Kistler-Morse KM ultrawave User Manual
Page 68
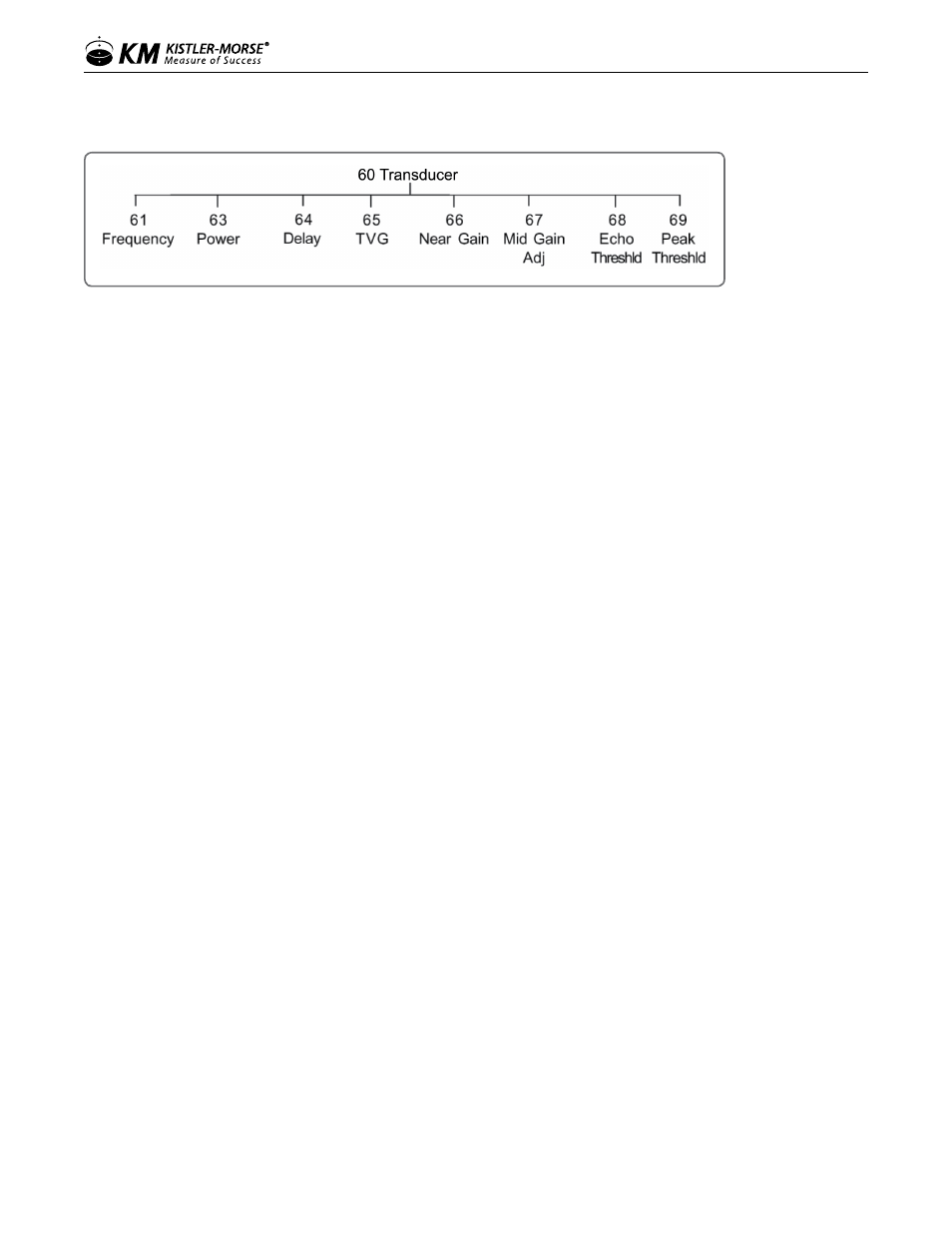
Figure 24: Transducer Menu Tree
61 frequency
Frequency has three submenus:
• Target — under Target, the target frequency of the transducer set up for the current channel is displayed
and can be modifi ed. For example, a 56T-25PT Transducer has a ‘nominal’ frequency of 43 KHz, but the
actual default frequency is 43.5 KHz. Small modifi cations of the target frequency can sometimes improve
the performance of the system.
• Monitor — this parameter allows you to view the frequency that the transducer for the current channel is
actually transmitting and receiving. It usually does not exactly equal the Target value, but is very close.
• Select — under Select, the transducer type for the current channel can be displayed and changed (you
may need to change it if you made an error during the Startup Procedure or have changed the
transducer). The model number of the transducer corresponds to the transducer type: Refer to the
model number of the transducer for the proper selection.
63 PoWer
Power defi nes the amount of output transmission power the controller utilizes. The range is 0 to 100%. The
default value is variable depending on quick confi guration settings.
64 delAy
Delay allows you to set up a transmission delay for the transducers. Delay is the amount of time between
transmit signals from the UltraWave Series. Increasing Delay may be useful if you have a target (such as a liquid)
that causes a lot of bouncing of signals. Delaying the next transmit signal allows the noise from the bouncing to
dissipate before the next signal is transmitted.
Note: Delay is typically used only for a single-channel system.
65 tVg (tiMe VAried gAin)
TVG adjusts the UltraWave Series ability to pick up return echoes. When material is close to the transducer,
the sound energy in the return echo is very high and the time for the return echo to reach the transducer is very
short. As the level in the vessel decreases, the sound energy decreases and the time for the return echo to reach
the transducer increases. Gain can be used to amplify the return echo, to allow a low energy echo (caused by
low material level) to be picked up. However, if the gain is left continuously at a high setting to provide accurate
tracking of low material levels, it will also result in amplifi cation false echoes. This can also cause the transducer
to pick up its own transmission burst as a return echo from a full vessel, resulting in lockup of the level display at
64
97-1163-01 Rev. D
www.kistlermorse.com