Bldc commutation time with zero crossing sensing – Motorola M68HC08 User Manual
Page 43
BLDC Motor Control
Used Control Technique
DRM028 — Rev 0
Designer Reference Manual
MOTOROLA
BLDC Motor Control
43
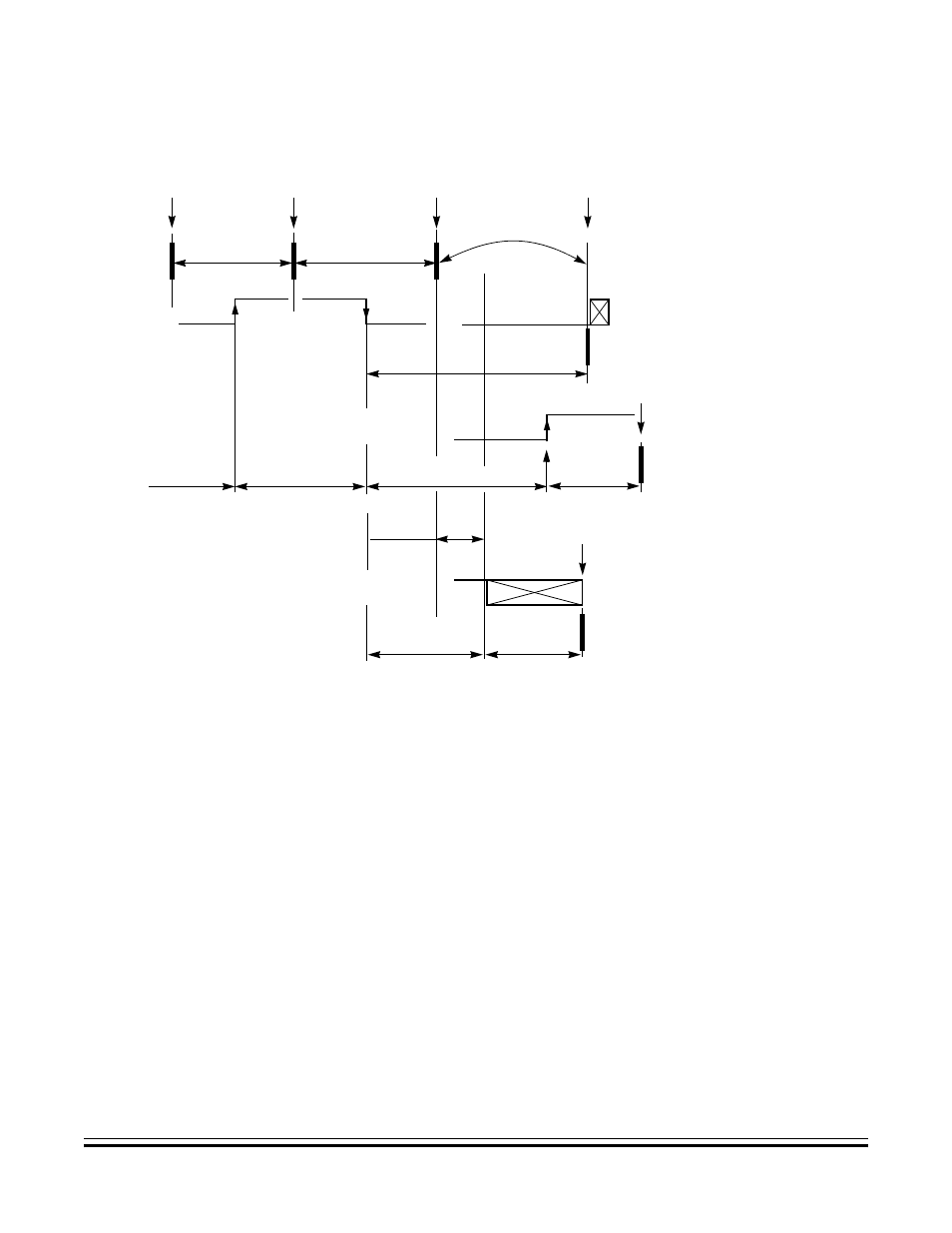
Figure 3-17. BLDC Commutation Time with Zero Crossing Sensing
The following calculations are made to calculate the commutation time
(T2[n]
) during the Running state:
•
Service of commutation — The commutation time (T2[n]) is
predicted:
T2[n] = T_Cmt[n] + 2*Per_ZCrosFlt[n-1]
If 2*Per_ZCrosFlt>Per_Cmt_Max
then result is limited at Per_Cmt_Max
•
Service of received back-EMF zero crossing — The
commutation time (T2*[n]) is evaluated from the captured
back-EMF zero crossing time (T_ZCros[n]):
Per_ZCros[n] = T_ZCros[n] - T_ZCros[n-1] = T_ZCros[n] - T_ZCros0
Per_ZCrosFlt[n] = (1/2*Per_ZCros[n]+1/2*Per_ZCros0)
HlfCmt[n] = 1/2*Per_ZCrosFlt[n]- Advance_angle =
= 1/2*Per_ZCrosFlt[n]- C_CMT_ADVANCE*Per_ZCrosFlt[n]=
Coef_HlfCmt*Per_ZCrosFlt[n]
2*Per_ZCrosFlt[n-1]
T_ZCros[n]
n-2
n-1
n
T_Cmt[n-2]
T_Cmt[n-1]
T_Cmt[n]
T_Cmt*[n+1]
COMMUTATION IS PRESET
T_Cmt**[n+1]
Per_HlfCmt[n]
Per_HlfCmt[n]
Per_ZCros[n]
Per_ZCros[n-1]
Per_ZCros[n-2]
Per_Toff[n]
Per_ZCros[n]
T_ZCros[n-1]
Per_ZCros0[n] =
Per_ZCros[n]
T2[n-3]
T2[n-2]
T2[n-1]
T2[n]
ZERO CROSSING
DETECTION SIGNAL
ZERO CROSSING
DETECTION SIGNAL
ZERO CROSSING
DETECTION SIGNAL
COMMUTATED AT PRESET TIME NO
BACK-BMF FEEDBACK WAS RECEIVED
CORRECTIVE CALCULATION 1.
BACK-EMF FEEDBACK
RECEIVED AND EVALUATED
COMMUTATED WHEN BACK-EMF
ZERO CROSSING IS MISSED
CORRECTION CALCULATION 2.
F
re
e
sc
a
le
S
e
m
ic
o
n
d
u
c
to
r,
I
Freescale Semiconductor, Inc.
For More Information On This Product,
Go to: www.freescale.com
n
c
.
..