Alignment – Motorola M68HC08 User Manual
Page 40
BLDC Motor Control
Designer Reference Manual
DRM028 — Rev 0
40
BLDC Motor Control
MOTOROLA
The current controller subroutine, with PI regulator, is called to control
dc-bus current. It sets the correct PWM ratio for the required current. The
current PI controller works with constant execution (sampling) period.
This period should be a multiple of the PWM period, in order to
synchronize the current measurement with PWM:
Current controller period = n/PWM frequency
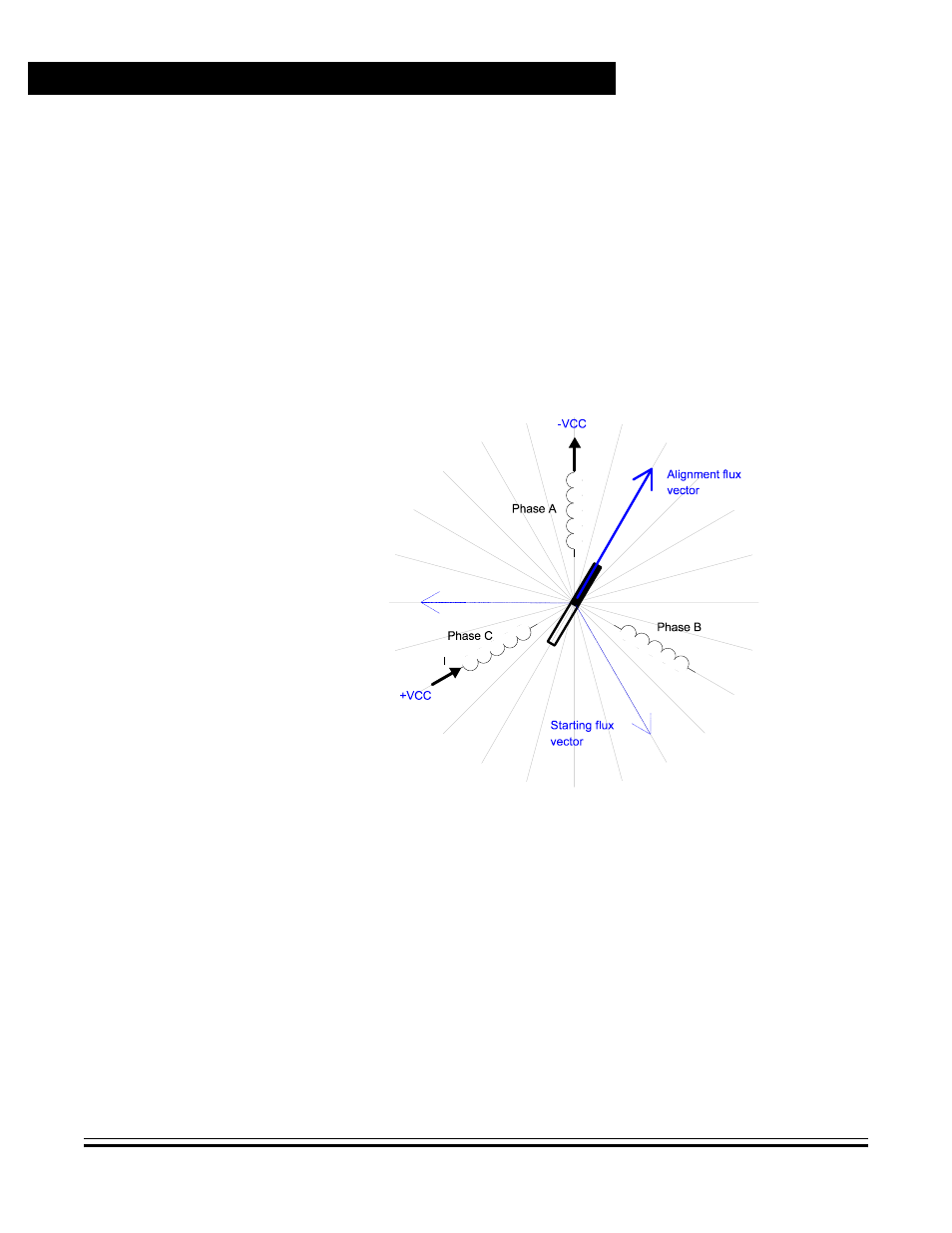
The BLDC motor rotor position with flux vectors during alignment is
shown in
Figure 3-15. Alignment
3.3.1.2 Running
The commutation process is a series of states which assure:
•
The back-EMF zero crossing is successfully captured
•
The new commutation time is calculated
•
The commutation is performed
The following processes need to be provided:
F
re
e
sc
a
le
S
e
m
ic
o
n
d
u
c
to
r,
I
Freescale Semiconductor, Inc.
For More Information On This Product,
Go to: www.freescale.com
n
c
.
..