Yaskawa F7 Drive Enhanced PID With Digital Velocity Follower User Manual
Page 8
Date: 08/08/05, Rev: 05-08
Page 8 of 17
TM.F7SW.058
4.1 Parameters (continued)
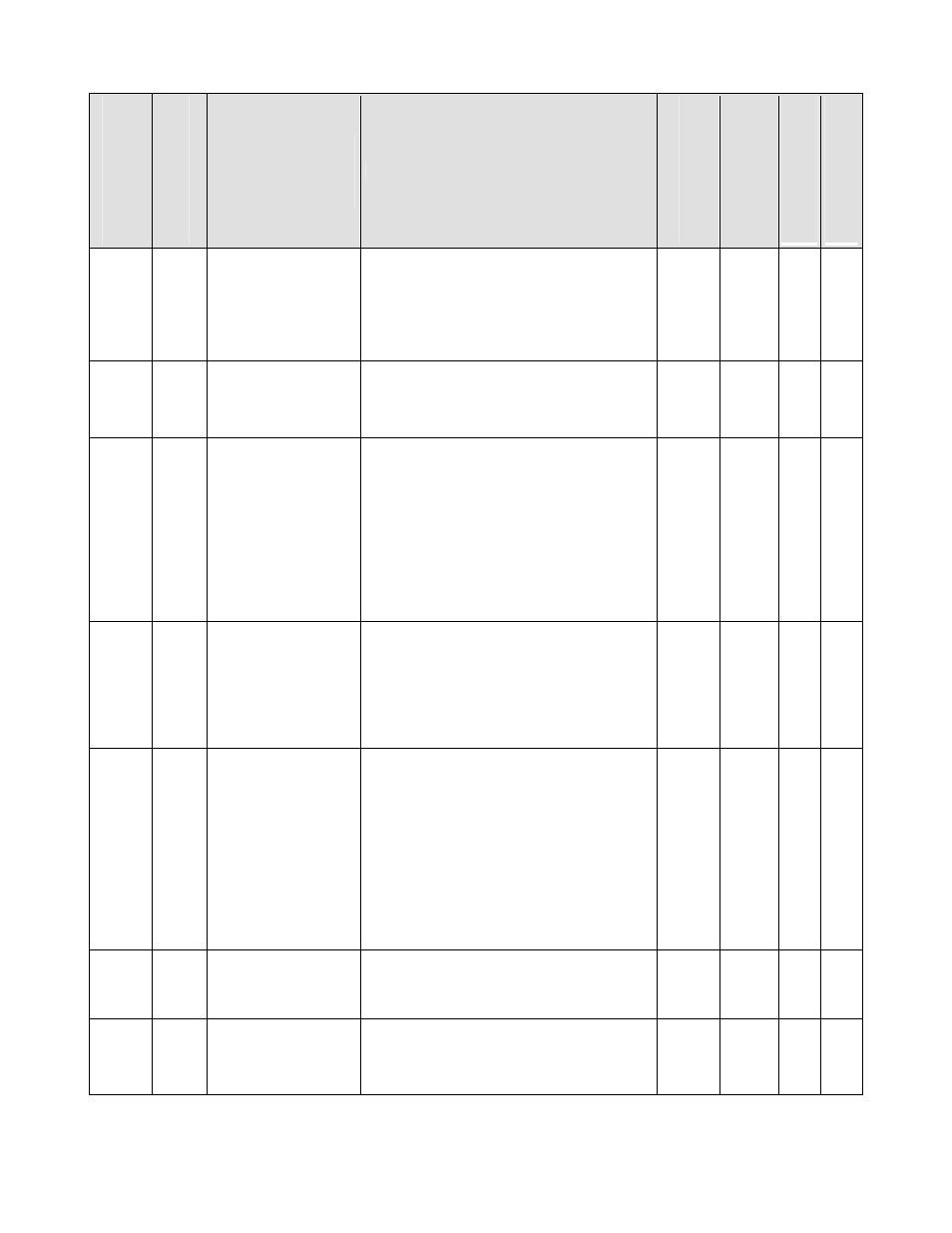
Parameter
Number
Modbus Address
Parameter Name
Digital Operator
Display
Description
Range
Default
Change During
Run
Access Level For All
Control Modes *1
P2-02 60BH
PID Output Gain 2
Output Gain 2
This parameter sets the gain at the
output of the PID. Functions the same as
PID Output Gain (B5-10), but with finer
resolution (0.01 versus 0.1). The total
output gain is determined by B5-10 x P2-
02.
0.00
~
25.00
1.00 No A
P2-03 60CH
PID Setpoint Offset
Setpoint Offset
This parameter sums with the PID
setpoint (analog input, pulse input,
network communication, or parameter) to
provide an offset.
-100.0
~
+100.0
%
0.0 No A
P2-04 60DH
PID Trim Mode
Selection
PID Trm Mode Sel
This parameter selects how the PID
output will trim the frequency reference.
Active only when b5-01 = 3 or 4.
0: Constant
The PID output trim is independent of
the frequency reference.
1: Freq Ref Prop
The PID output trim is proportional to
the frequency reference.
0 ~ 1
0
No
A
P2-05 60EH
Frequency
Reference
Proportional Trim
Lower Limit
FrefProp Low Lim
This parameter sets the lower limit of the
PID output trim of the frequency
reference when P2-01 = 1 (trim is
proportional to the frequency reference).
Active only when b5-01 = 3 or 4 and P2-
04 = 1.
0.00
~
100.00
%
10.00 Yes
A
P3-01 614H
Master Encoder
Pulses per
Revolution
Master PG PPR
This parameter sets the resolution, in
pulses per revolution, of the encoder
used in the digital velocity follower
function. This applies to the PG-W2, PG-
X2, and PG-B2 cards. Parameter E2-04
(Motor Poles) must also be correctly set.
The PG-W2 and PG-X2 have a
maximum input frequency of 300 kHz.
The PG-B2 has maximum input
frequency of 32 kHz.
1
~
60,000
1024 No A
P3-02 615H
Ratio Numerator
Ratio Numerator
This parameter sets the numerator of the
gear ratio in the digital velocity follower
function.
1
~
65,535
10000 Yes
A
P3-03 616H
Ratio Denominator
Ratio Denominator
This parameter sets the denominator of
the gear ratio in the digital velocity
follower function.
1
~
65,535
10000 Yes
A
*1: Access Level (A1-01): Q = “Quick Start”, A = “Advanced”, F = “Factory”.