Yaskawa F7 Drive Enhanced PID With Digital Velocity Follower User Manual
Page 5
Date: 08/08/05, Rev: 05-08
Page 5 of 17
TM.F7SW.058
2.0 Changes from Standard Product
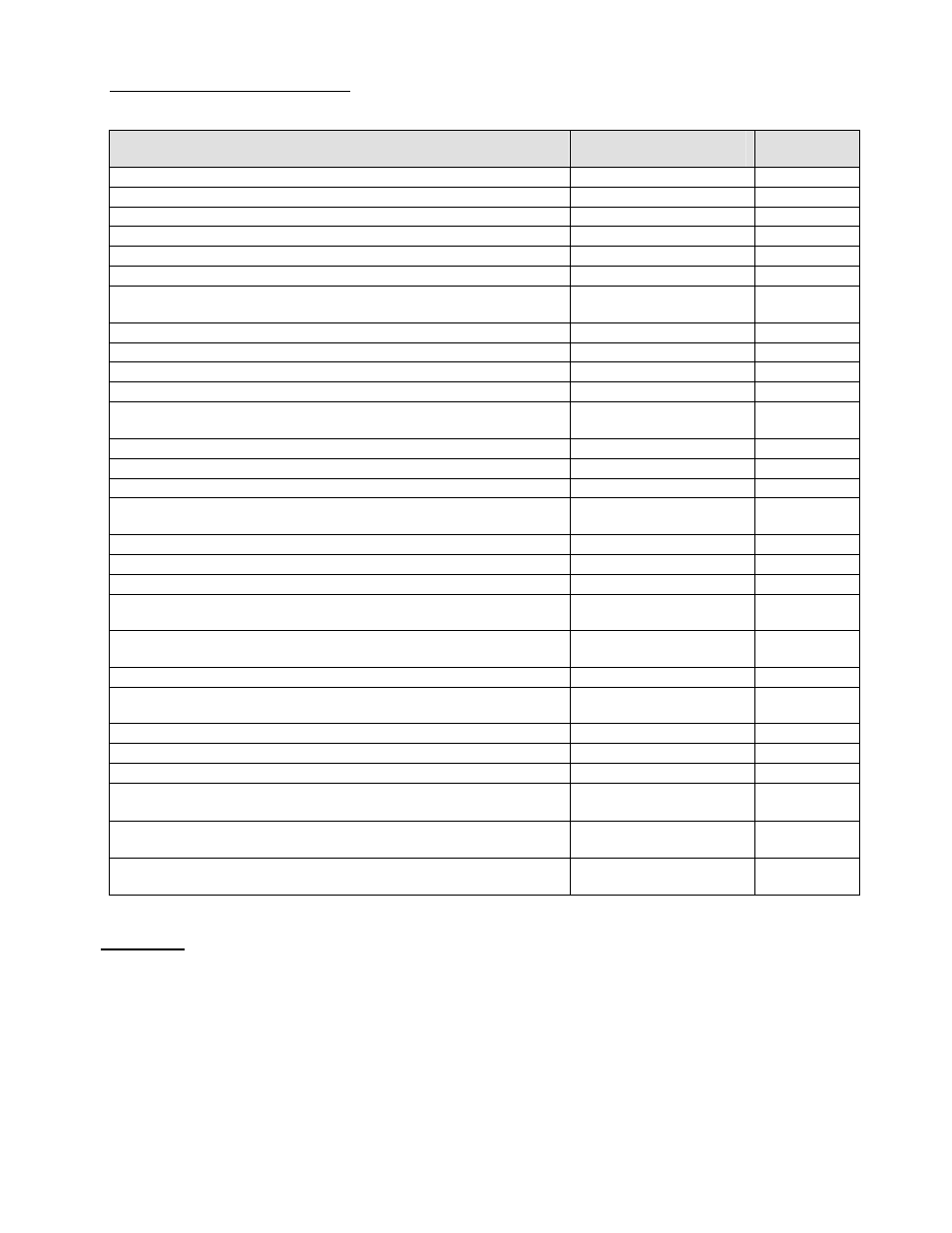
2.1 Enhanced PID / Digital Velocity Follower versus Standard Software
Feature
Enhanced PID /
Digital Velocity Follower
Standard
Software
PID Process Controller
√
√
Full Range PID (2-input)
√
√
PID + Frequency Reference Capable (3-input)
√
√
PID x Frequency Reference Capable (3-input)
√
PID Setpoint Offset Parameter Added
√
Bi-Directional PID Output
√
√
PID + Trim is Accomplished Algebraically, Regardless of
Commanded Direction
√
Frequency Reference as PID Setpoint
√
√
Parameter B5-19 “PID Setpoint” can be changed during running
√
Independent Digital PID Setpoint
√
√
Independent Digital PID Setpoint (changeable during run)
√
Multiple PID Setpoint Sources (digital preset, analog, pulse
input, Modbus RTU, option card)
√
√
Setpoint Ramp (when PID setpoint is from frequency reference)
√
√
Setpoint Ramp (all PID setpoints, regardless of source)
√
Multiple PID Feedback Sources (analog, pulse input)
√
√
Feedback Detection (high, low, on-delay, off-delay, digital
output, alarm, fault, during run, always detected)
√
PID Monitors with User Units (scaled using parameter O1-03)
√
Detailed PID Monitors (proportional, integral, derivative)
√
Integral Hold Digital Input
√
√
Positive Integral Hold Digital Input (integrator can only
decrease)
√
Negative Integral Hold Digital Input (integrator can only
increase)
√
PID Output Limit
√
√
Independent + / - PID Output Limits (B5-06 PID limit now
functions only as a PID upper limit)
√
PID Output Gain can be proportional to the frequency reference
√
PID Output Gain (0.1 Resolution)
√
√
PID Output Gain (0.01 Resolution)
√
Digital Velocity Follower Functionality Added for Use with a PG-
W2, PG-X2, or PG-B2 Option Card
√
Directional Precision Encoder Frequency Reference (requires
PG-W2 or PG-X2)
√
Parameter E2-04 (Motor Poles) is Available in All Control Modes
(advanced access level only for V/f and Open Loop Vector)
√
3. Limitations
The digital velocity follower feature (B1-01 = 5) cannot be used under either of the following conditions:
a. If a PG-W2 is installed, and “Motor 2” uses the V/Hz w/PG or Flux Vector control method (E3-01 = 1 or 3).
b. If a PG-X2 / PG-B2 is installed and control method is V/Hz w/PG or Flux Vector (A1-02 = 1 or 3).
Note: If the PG-W2 option is used, jumper HDR1 must be set to the “top”
position (using the 2 pins closest to the 4CN connector).