Yaskawa F7 Drive Enhanced PID With Digital Velocity Follower User Manual
Page 11
Date: 08/08/05, Rev: 05-08
Page 11 of 17
TM.F7SW.058
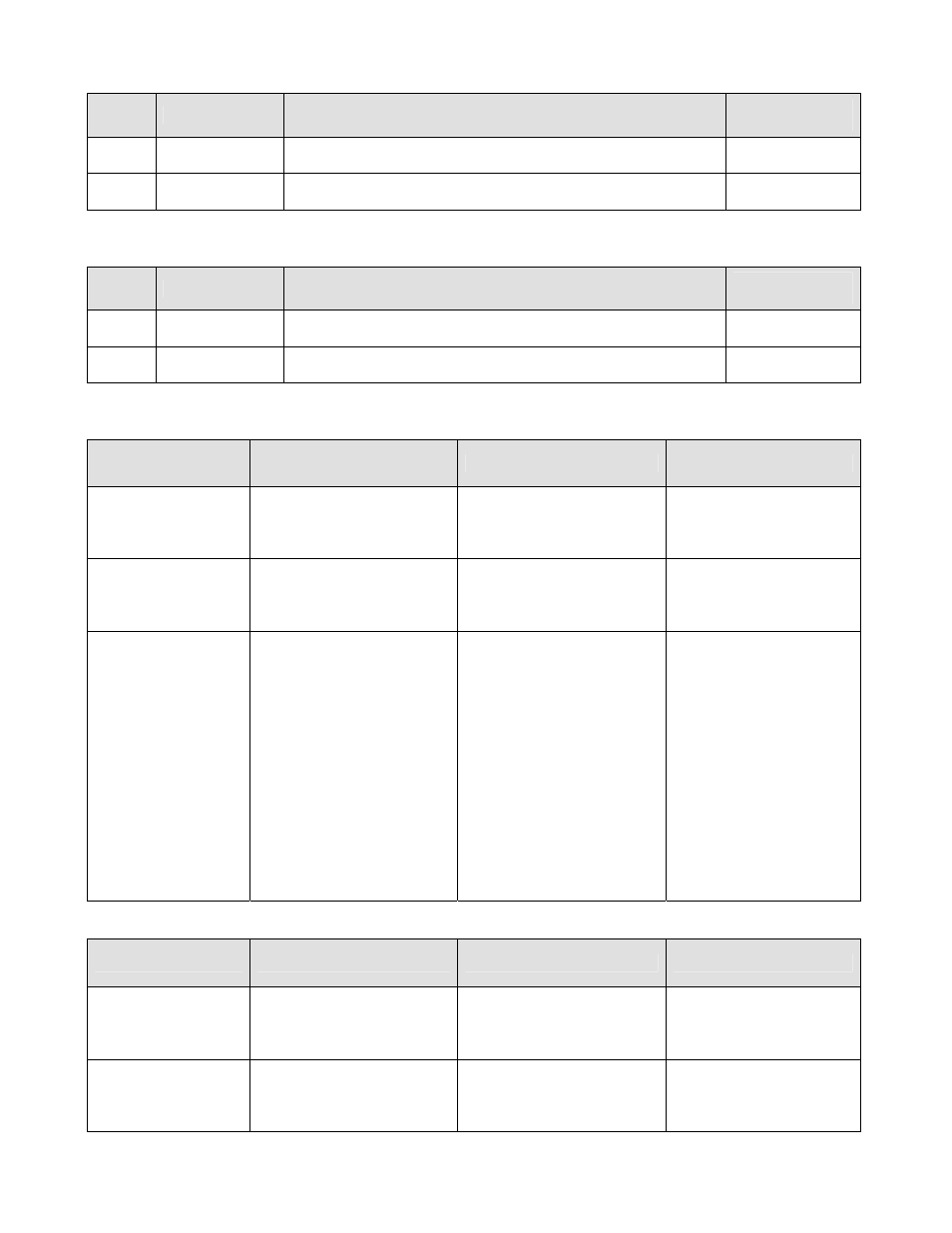
4.3 Multi-function Digital Input Settings (H1-0X)
Setting
Display
Description
Available For All
Control Modes
80
Positive Integral
Hold
Closed: Integral is permitted to decrease, but not increase.
√
81
Negative
Integral Hold
Closed: Integral is permitted to increase, but not decrease.
√
√: Available.
4.4 Multi-function Digital Output Settings (H2-0X)
Setting
Display
Description
Available For All
Control Modes
40 Feedback
High
Closed: PID feedback has exceeded P1-02 level for the time
set in P1-03.
√
41 Feedback
Low
Closed: PID feedback has fallen below the P1-05 level for the
time set in P1-06.
√
√: Available.
4.5 Faults
Fault Display
Description
Cause
Countermeasures
FRH
Feedback Range
High
PID feedback out of range
(high). Motor will coast to a
stop.
P1-01 = 4 or 5 and the PID
feedback has exceeded the
P1-02 level for the time set
in P1-03.
Correct the cause of the
high feedback signal.
FRL
Feedback Range
Low
PID feedback out of range
(low). Motor will coast to a
stop.
P1-01 = 4 or 5 and the PID
feedback has fallen below
the P1-05 level for the time
set in P1-06.
Correct the cause of the
low feedback signal.
OPE12
PID / DVF Err
1. PID limit setting error
2. Motor 2 control method
is Flux Vector or V/Hz
w/PG and the frequency
reference source is PG
Option Card
3. PG-X2 or PG-B2 card
installed, control method is
Flux Vector or V/Hz w/PG,
and the frequency
reference source is PG
option card
1. P2-01 is set greater than
B5-06
2. B1-01 = 5,
E3-01 = 1 or 3,
and H1-XX = 16
3. PG-X2 / PG-B2 installed,
A1-02 = 1 or 3,
and B1-01 = 5
Correct the parameter
settings.
4.6 Alarms
Alarm Display
Description
Cause
Countermeasures
FRH
Feedback Range
High
PID feedback out of range
(high)
P1-01 = 2 or 3 and the PID
feedback has exceeded the
P1-02 level for the time set
in P1-03.
Correct the cause of the
high feedback signal.
FRL
Feedback Range
Low
PID feedback out of range
(low)
P1-01 = 2 or 3 and the PID
feedback has fallen below
the P1-05 level for the time
set in P1-06.
Correct the cause of the
low feedback signal.