0 installation – Research Concepts RC3000 User Manual
Page 25
RC3000 Antenna Controller
Chapter 2
Installation
17
2.0 INSTALLATION
Proper installation is important if the full capability and accuracy of the RC3000 is to be realized. The
procedures that follow will insure the optimum level of performance from all sensors and the system in
general.
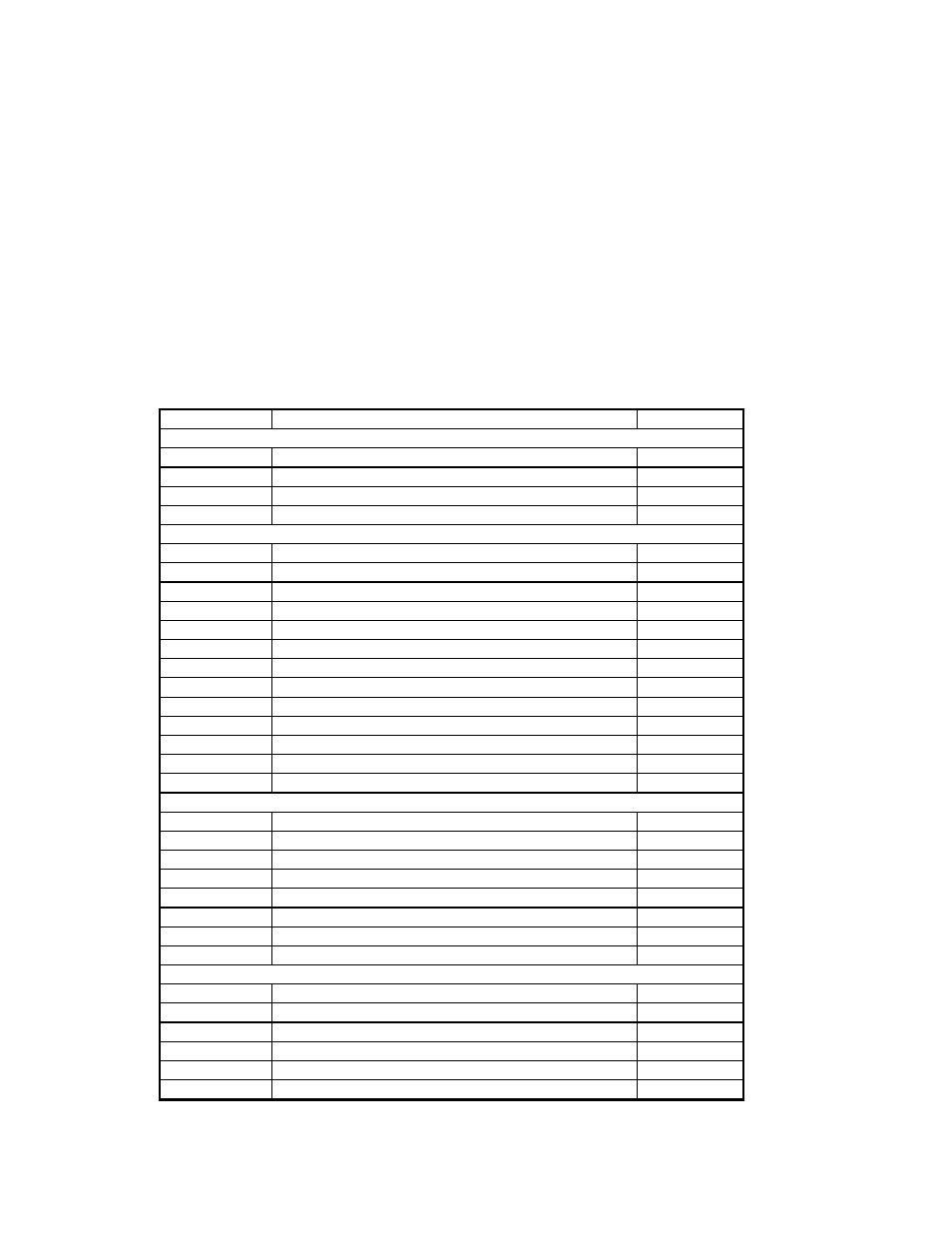
Installation will be more efficient if each step in the physical installation and calibration be performed in
the order in which it appears in the following schedule. Each step is referenced to a particular section of
this manual, and should be checked off as it is completed. Coordination between the mount
manufacturer, vehicle integrator and end user is required. Some steps are applicable only if the tracking
or remote control options were purchased with the unit. The installation procedures are written to cover
the most common mount installations. Some steps are slightly different according to the type of mount
the RC3000 is interfacing to (see appendix B). Installation requires basic operational knowledge of the
RC3000. Please review chapter 3 for information on how to navigate the RC3000’s screens and how to
enter data.
SECTION ACTION
COMPLETE
2.1 Equipment Mounting
2.1.1
RC3000 Antenna Controller
2.1.2 GPS
Receiver
2.1.3 Fluxgate
Compass
2.1.4 Inclinometer
2.2 Electrical Connections
2.2.1 Power
Entry
2.2.2 Motor
Drive
2.2.3 Drive
Sense
2.2.4 Limit
Switches
2.2.5 Signal
Strength
2.2.6 Navigation
Sensors
2.2.7 Accessories
2.2.8 RF
Autopeak
2.2.9
Hand Held Remote
2.2.10 Pulse
Sensors
2.2.11
PC Remote Control
2.2.12 Waveguide
Switch
2.2.13 Resolver
Inputs
2.3 Initial Configuration
2.3.1 Software
Initialization
2.3.2 Elevation
Calibration
2.3.3 Azimuth
Calibration
2.3.4 Polarization
Calibration
2.3.5
Fast/Slow Motor Speed
2.3.6
Pulse Sensor Checkout
2.3.7
Drive System Checkout
2.3.8
Navigation Sensor Communication
2.4 Final Calibration
2.4.1 Compass
Calibration
2.4.2
Azimuth and Elevation Alignment
2.4.3
Signal Strength Adjustment
2.4.4
Pulse Scale Factors
2.4.5 Miscellaneous
Adjustments
2.4.6
Mechanizing Automatic Locate