Description of functions – BECKHOFF KL5051 User Manual
Page 6
Description of functions
6
KL5051
Description of functions
The BI-SSI interface terminal KL5051 serves to link the digital digi-
fas®7100/7200 servo amplifier from the Seidel company to the bus coupler
or the controller. The interface consists of two logical channels. The drive is
positioned via the first channel. With the second channel, release signals
are set, parameter data is transferred and status information or parameter
values are read.
It is therefore possible for a subordinate access controller to accept the
positioning information on Channel 1 while the higher-level controller sets
release signals on Channel 2 and performs the monitoring tasks.
LED display
The Run LED indicates the operating state of the terminal.
On – normal operation
Off – watchdog timer overflow has occurred. The green LED goes off if no
process data is transferred by the bus coupler for 100 ms.
Com error
On – communication fault, e.g. wire breakage on the data/clock line
Off – normal operation
Alarm
On – the connected device has sent a malfunction signal.
Off – normal operation
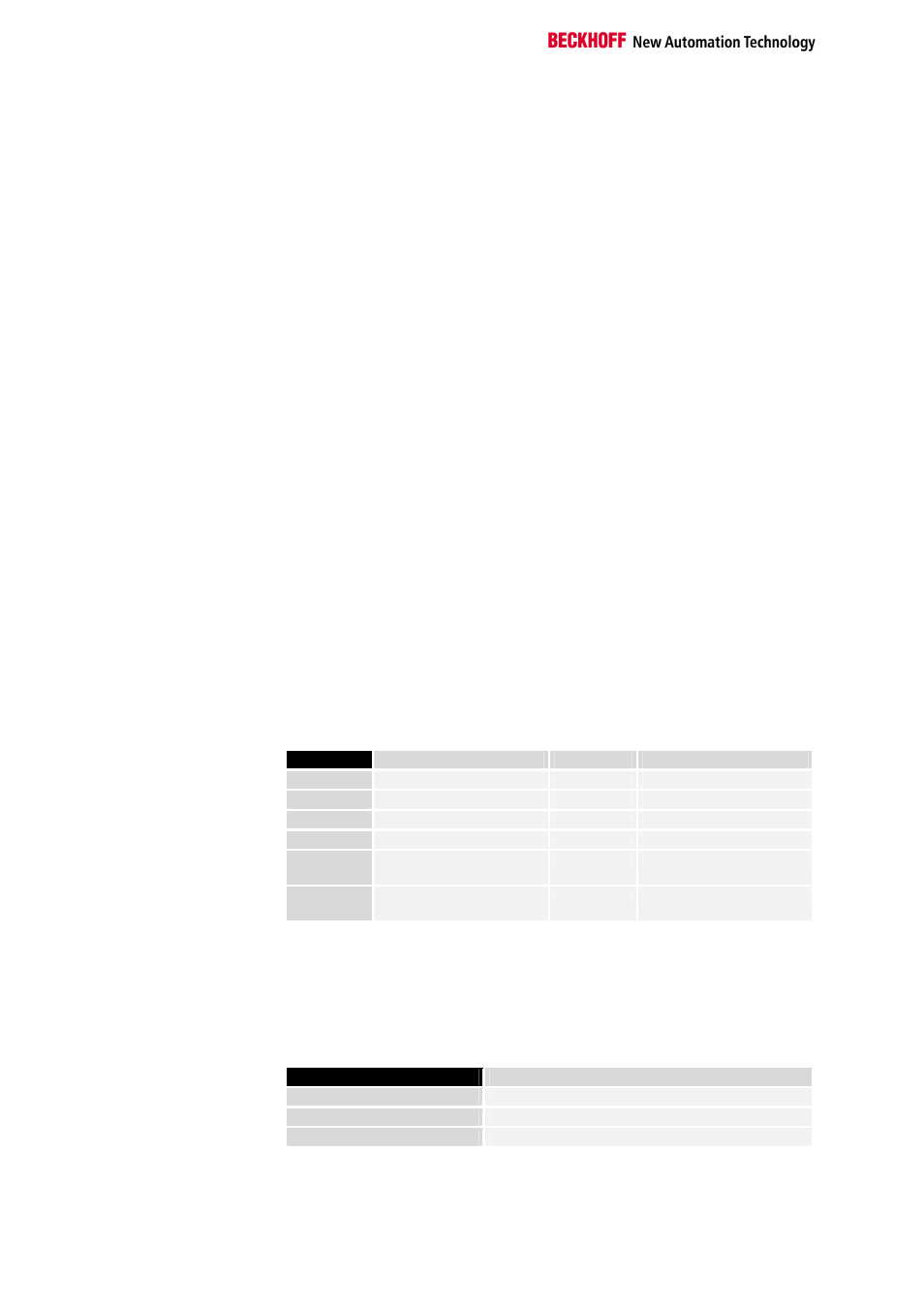
Process data
The KL5051 is mapped with 6 bytes of input data and 6 bytes of output
data. A0, A1, A2 and E0, E1, E2 constitute the channel for setting and de-
tecting the operating data of the servo.
A3, A4, A5 and E3, E4, E5 constitute the channel for detecting the servo
status and for setting the servo control. It is also used to parametrise the
servo.
Byte
Function
Byte
Function
A0
Operating data-control
E0
Operating data status
A1
Speed setpoint
E1
Actual position
A2
Speed setpoint
E2
Actual position
A3
Parameter-control
E3
Parameter status
A4
Parameter/control-
servo
E4
Parameter/status-servo
Á5
Parameter/control-
servo
E5
Parameter/status-servo
In A1, A2, the speed setpoint is specified as a 16-bit signed integer.
Refer to the manual of the servo for details of the maximum setpoint inputs.
The absolute actual position is located in E1, E2 as a 16-bit unsigned inte-
ger. The actual position has a resolution of 65536 increments per revoluti-
on.
Actual position in E1, E2
Rotation angle
0x0000
0
0x3FFF
90 °
0xBFFF
270 °