FeiYu Tech FY-30A User Manual
Page 4
GuiLin FeiYu Electronic Technology Co., Ltd
http://www.feiyudz.cn
E-mail:
GuiLin FeiYu Electronic Technology Co., Ltd
page 4
of 12 O’clock. Confirm the movement is now correct:
First Flight Test And Sensitivity Adjustment
1.
At this stage, your aircraft should already have automated
surface control with the right direction when in (Mode 3) Auto
Stabilized Mode enable.
2.
Now you need to fine tune your FY30A stability gain via
flight tests. For the first flight it is recommended that the gains not be set
too high. This will reduce large oscillation (flight overcorrection).
3.
Take off in Mode 1 (deactivated). After achieving safe height,
activate Mode 3 (Auto Stabilized).
4.
Aileron Gain: If you see oscillation of the wings, this
indicates the Aileron gain is set too high. Switch back to Mode 1
(deactivated) and land the airplane.
5.
Reduce the sensitivity (move dial towards centre position)
and fly again. You should see improvement in wing attitude. Adjust until
you are satisfied with the level of wing stabilization.
6.
Elevator & Rudder Gain: Too much Elevator gain will
show the tail moving up and down (rocking). Too much Rudder gain
will show tail wagging. Reduce gain until this flight over corrections
disappears.
7.
Alternately, if you find the flight correction is not enough
(too low stability), you can increase gain accordingly.
Recording your Aircraft Attitude (Dip Switch No. 4)
1. The FY30A can record your aircraft best stabilization attitude in its
memory.
2. This is advantageous as each aircraft is unique in terms of attitude
control. By recording your aircraft ‘Neutral Value’, the FY30A can
know how best to control your aircraft for optimum stability.
3. It is best to carry out this procedure during minimal wind conditions:
Step 1: Set up your aircraft as per this manual for stabilized flight,
including setting the
right gain for the 3 dials.
Step 2: Land and power down the
aircraft. Move Dip Switch No. 4 to ‘ON’
position:
Step 3: Take off again, in full manual control (Mode 1 –
Deactivated Mode). Fly to a safe height and in a straight line.
Step 4: Adjust your throttle to maintain stable cruising flight. Use
your Aileron, Rudder and Elevator trims to attain level flight while in
manual control. By doing this you should be able to fly the aircraft in a
straight line with the Aileron, Elevator and Rudder sticks in the middle
position (i.e. fly
using trims only).
This condition of achieving level flight by trim adjustments and no
stick input is your aircraft’s
‘
Neutral Value’.
Step 5: While in Neutral Value, activate
Mode 3 (Auto Stabilization Mode). Since Dip
Switch No. 4 is ON, the FY30A will now record
your Neutral Point. Recording takes about 3
seconds. After 3 seconds, switch back to manual
mode and land your aircraft.
Step 6: After landing, power down your aircraft. Move Dip Switch
No. 4 back to OFF position. Procedure is complete.
4. As long as there are no major changes in your aircraft hardware (e.g.
no shifting of C o G) your Neutral Value will not change. If there are
major changes in hardware or your CoG have shifted, it is best you
repeat this Neutral Value recording procedure.
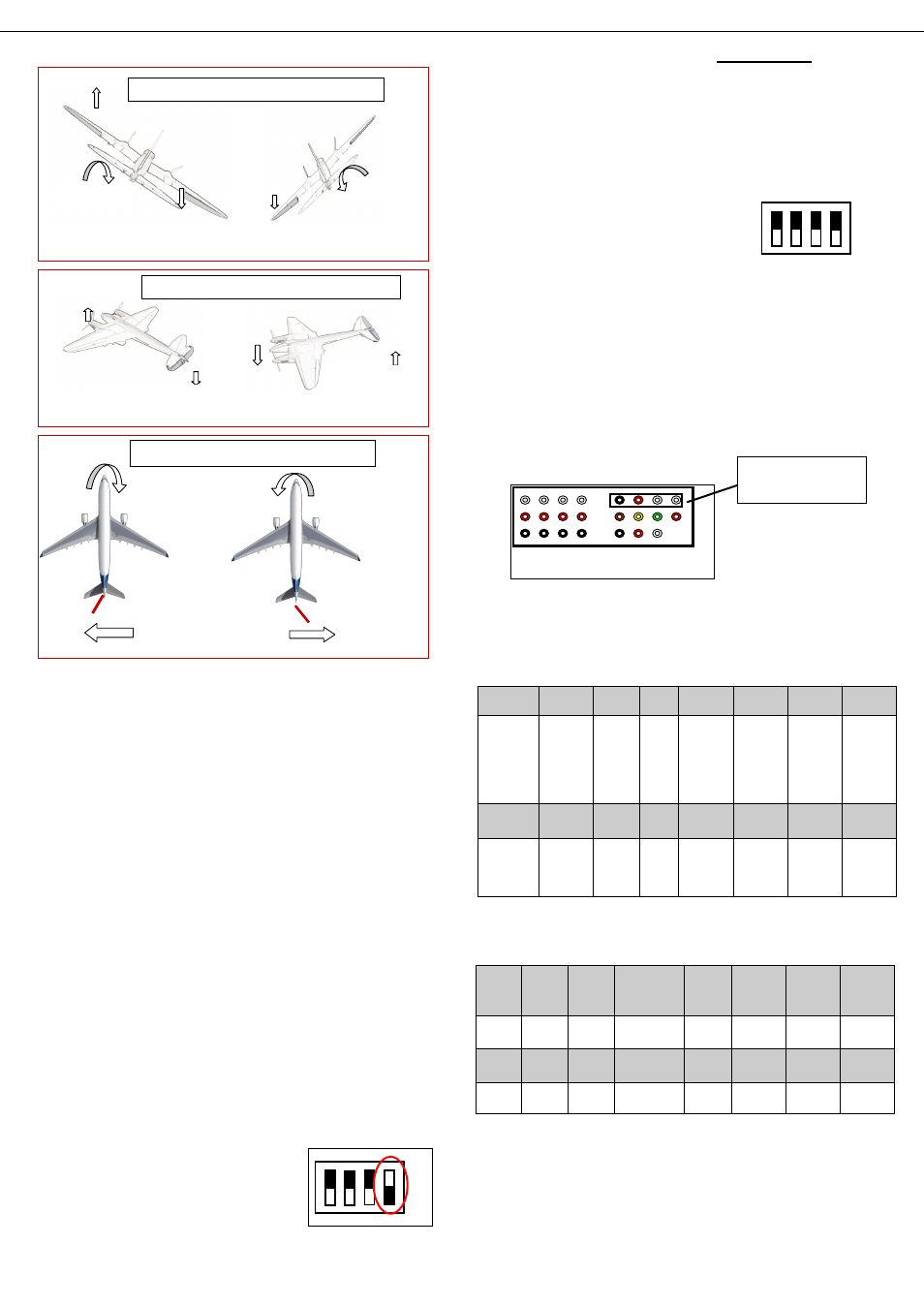
FY-30A attitude data output
FY-30A Outputs pitch angle and roll angle data via data port
(UART) output. The interface position as shown below:
Data from the header and data segments, each field separated by
commas.
Standard serial interface characteristics:
Baud Rate: 19200
Level: TTL
Example of UART Data Output:
$FYZT,-0.98, 0.12, -0.08, -0.05, -0.31, 0.10, , , , 1.01, , ,0*00
Interpretation:
——END——
Note: We reserve the right to change this manual at any
time! And the newest edition will be shown on our website
www.feiyudz.cn.
Command
Types
Comman
d header
Field 1
Field
2
Field 3
Field 4
Field 5
Field 6
Attitude
data
$FYZT
Pitch
(Unit:
degrees)
Roll
(Degr
ees)
Course
(Degrees)
X Angular
velocity
(Degrees)
Y Angular
velocity
(Degrees)
Z Angular
Velocity
(Degrees)
Field 7
Field 8
Field 9
Field
10
Field 11
Field 12
Field 13
Check
Unused
Unused
Unused
Result
ant
accele
ration
Unused
Unused
Attitude
error
To test the
value of
00
Profile
format
$FYZT
Pitch
Roll
Course
X
Angular
velocity
Y
Angular
velocity
Z
Angular
Velocity
Data
-0.98
0.12
-0.08
-0.05,
-0.31,
0.10
Unused
Unused
Unused
Resultant
acceleration
Unused
Unused
Attitude
error
* Test
value
1.01
0
00
Rotate right
1 2 3 4
OFF
ON
1 2 3 4
OFF
ON
A
B
4
5
6
7
C
1
2
3
8
UART Port:
Gnd, +Ve, Data, Data
Rotate left
Elevator moves down
Elevator moves
up
Nose Up
Nose Down
Down
Elevator Movement In Auto Stabilization Mode
Mode
Left aileron automatically
moves upward.
Roll right
Right aileron automatically
moves downward.
Right aileron automatically
moves upward
Roll left
Left aileron automatically
moves downward
Aileron Movement In Auto Stabilization Mode
Rudder moves
to the left
Rudder moves
to the right
Rudder Movement In Auto Stabilization Mode