Baldor MN1940 User Manual
Page 31
www.baldormotion.com
Operation 5-5
MN1940
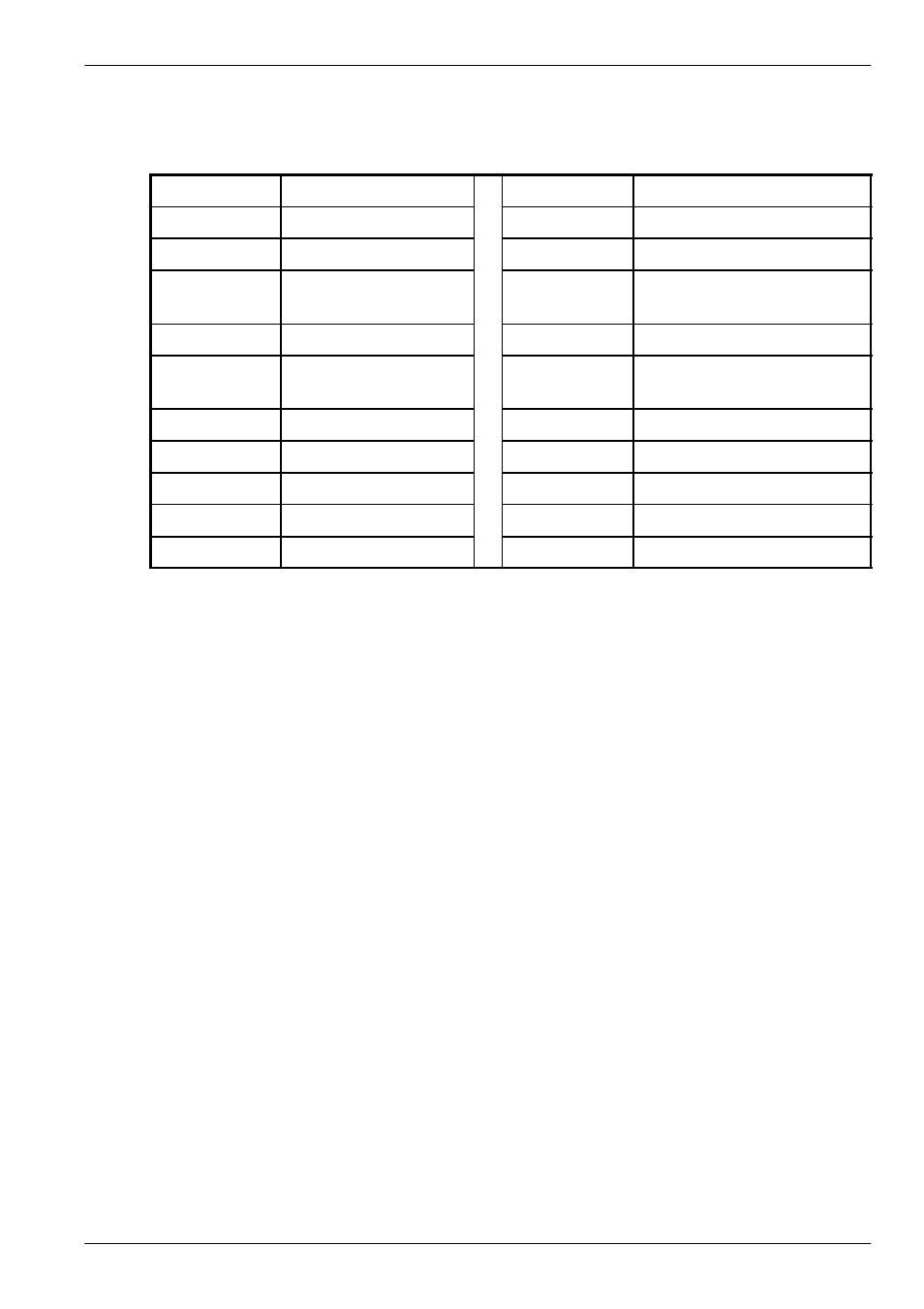
Microstep Resolution Select (MSEL)
The MSEL parameter specifies the microstep resolution of the DSM. The following table lists
valid MSEL parameter settings:
MSEL value: Steps per revolution
MSEL value: Steps per revolution
1 200
64 12800
2 400
100 20000
4 800
108 21600
(1 microstep = 1 arc minute)
5 1000
125 25000
8 1600
127 25400
(1 microstep = 0.001 mm)
10 2000
128 25600
16 3200
180 36000 (1 microstep = 0.01°)
25 5000
200 40000
32 6400
250 50000
50 10000
256 51200
Motor Run Current (MRC)
The Motor Run Current (MRC) parameter sets the motor run current to a percentage of the full
output current of the DSM driver section.
Hold Current Delay Time (HCDT)
The HCDT parameter sets the delay time between the last clock pulse and the application of
the holding current.
Motor Hold Current (MHC)
The MHC parameter sets the motor hold current as a percentage of the full output current of
the driver. If the hold current is set to 0, the output circuitry of the driver section will disable
when the hold current setting becomes active. Following the last step clock pulse, the hold
current setting becomes active after the period specified by HCDT.
Direction Override (DIR)
The DIR parameter changes the motor direction relative to the direction input signal, adapting
the direction of the DSM to operate as your system requires.
Factory button
The Factory button resets each parameter in the software to factory default values. Click Set
to apply these values.
Recall! and Upgrade! menu options
The Recall! option uploads the existing parameter settings from the DSM.
The Upgrade! option (if present) must not be used! It currently has no purpose and will
erase the firmware on the DSM, leaving it inoperable. If you have accidentally selected the
Upgrade! option, please contact Baldor customer support.