Products and solutions control solutions – Orbital Research Advanced Controls Group User Manual
Page 2
Orbital Research, Inc.
4415 Euclid Ave., Suite 500
leveland, OH 44103-3733
C
Contact: Frederick J. Lisy, Ph.D.
Telephone (216) 649-0399
E-mail [email protected]
distributed control of nonlinear systems, theory
is not sufficiently advanced to be useful. In
these cases we possess a portfolio of
biologically inspired algorithms and artificial
intelligence techniques that permit the
development of effective, robust and flexible
control systems.
One type of biologically inspired algorithm,
known as a Swarm intelligence-based algorithm,
a type of biologically inspired algorithm derived
from the observed behaviors of social animals
such as ants. This type of algorithm has been
proven to be very effective in the design of
cooperative control algorithms for large groups
of unmanned vehicles. In these instances,
optimization is not feasible in real time and there is a clear need
for the development of decentralized strategies that will enable
the vehicles to coordinate effectively. By observing the myriad of
ways in which colonies of insects use simple, reactionary behaviors
to emerge complex group actions such as the creation of
temperature regulated nests or birds flocking, we have extracted
simple principles and behaviors which allow the development of
group coordination algorithms for applications such as UAV swarm
control, cargo handling, data packet routing, data mining and
multi-sensor fusion.
We have developed several biologically inspired Artificial Neural
Network (ANN) reflex control systems. The architectures of
these systems is based upon the actual neural architecture of a
cockroach’s escape reflex. The cockroach possesses an incredibly
robust escape reflex that has been perfected over millions of years
through evolution and can, among other things, successfully evade
multiple predators simultaneously and take environmental
considerations such as obstacles into account, nearly
instantaneously. By mimicking this neural architecture we have
developed Autonomous Threat Response (ATR) and collision
avoidance systems, targeting algorithms and sensor data fusion
algorithms. We have also developed and applied ANNs to
numerous other systems.
Orbital Research’s Advanced Control Group offers a full range of
control algorithms and control system design services. In addition
to our portfolio of control algorithms, we have a suite of
proprietary design and analysis tools for the development and
customization of control algorithms for specific applications. This
suite includes a distributed simulation environment, Hybrid
Integrated Virtual Environment (HIVE), which permits the rapid
development of high fidelity numerical models and facilitates the
interaction between multiple systems including human in the loop
(HIL) systems. HIVE interacts with our Advanced Control
Toolbox (ACT), which allows the rapid formulation of control laws
and algorithms as well as their refinement through optimizing
searches such as Genetic Algorithms (GA). One of the strengths
of HIVE is the ability to use a common system from development
through deployment.
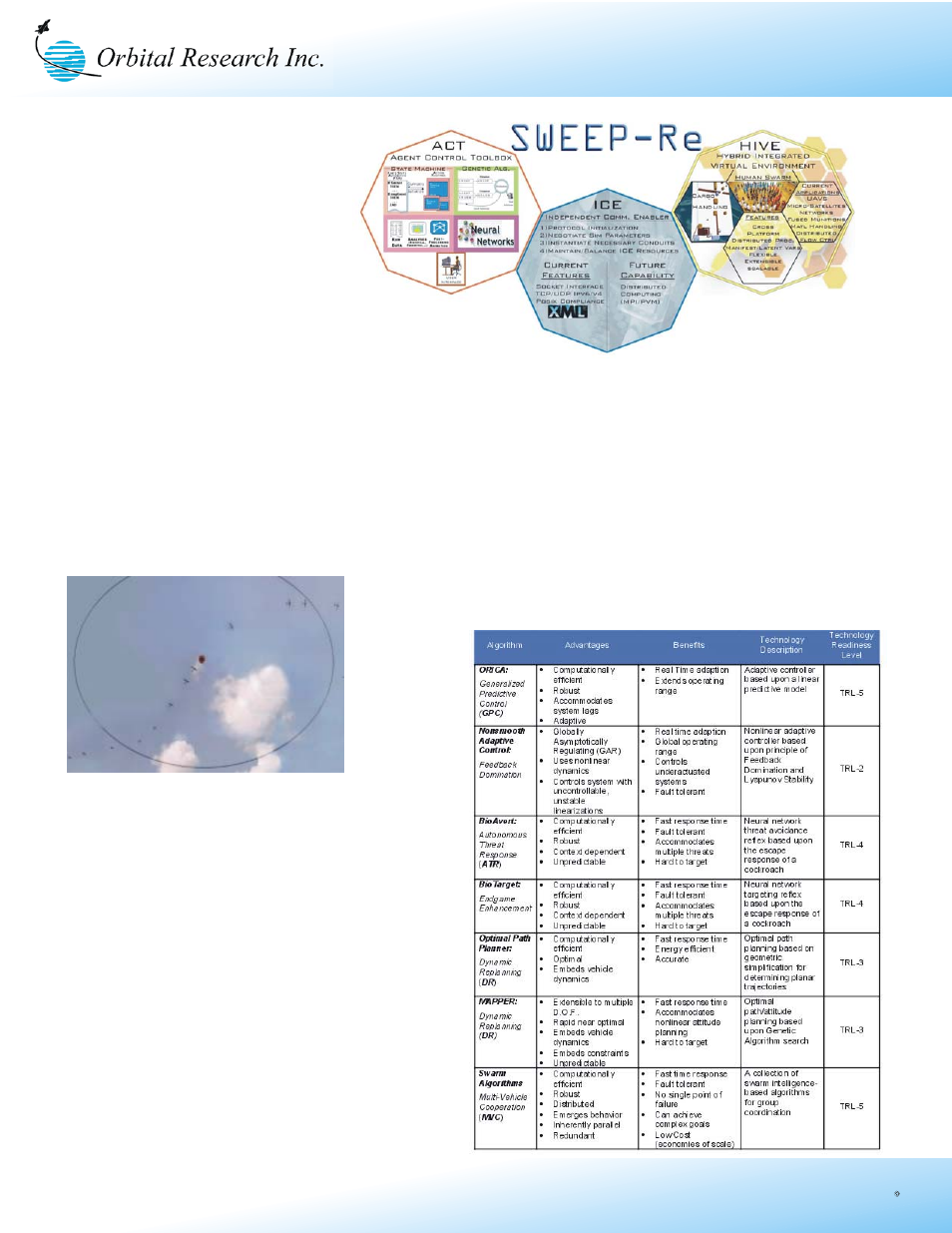
The following table provides the features, benefits and
descriptions for Orbital Research’s portfolio of control solutions.
Products and Solutions
Control Solutions
www.orbitalresearch.com
Copyright 2003
Rev: RMK-11-07-03
Neu ral Ne t
refle xes enable
rob ust t hreat
response as
well as targeting
for Unmann ed
Air Veh icles
Algorithm development su ite enables rapid formulation of control
systems for complex systems in cluding human- in-t he-loop (HIL) systems