Orbital Research Advanced Controls Group User Manual
Orbital Research Equipment
Technology
Modern/Advanced Control
Nontraditional Control
Orbital Research’s Advanced Controls group has a wealth of
expertise and design capabilities across the entire range of
control system design philosophies – from highly advanced
nonlinear design techniques to nontraditional methods such as
artificial neural networks. The Advanced Control Group’s
strength lies in creating innovative solutions to difficult control
engineering problems by combining the different techniques in
novel ways. Though each of these techniques can be used in a
stand-alone fashion, more powerful and intelligent control
systems can be produced when they are designed to operate in
concert. These hybrid controllers are capable of effectively
controlling systems that are intractable to any single approach
and provides a level of flexibility and robustness that cannot be
achieved in any other way.
In addition to extensive knowledge of modern state space
control design techniques such as optimal and robust control, we
possess proprietary, cutting edge nonlinear control algorithms
that provide a level of performance, stability and robustness
unrivaled by any commercially available control algorithm. These
proprietary algorithms include computationally efficient adaptive
control algorithms that can be implemented in real time for
highly dynamic systems and nonlinear control algorithms that can
be readily applied to large numbers of real world systems.
For systems whose characteristics evolve smoothly over their
operating range (i.e., changing fuel levels or component wear),
we have several linear adaptive control algorithms including Self
Tuning Regulators (STR), Model Reference Adaptive Systems
(MRAS) and a computationally efficient Generalized Predictive
Control (GPC). We have developed and demonstrated control
systems for suppression of aircraft wing flutter, missile tracking
telescopes and distributed flow effectors.
For more difficult challenges such as the design of fault tolerant
control systems for aircraft, we have a family of nonsmooth
control algorithms based upon the principle of feedback
domination and Lyapunov stability. These algorithms are not only
capable of accommodating systems whose dynamics change in a
nonsmooth fashion but can also control unstable nonlinear
systems that are otherwise uncontrollable with any other existing
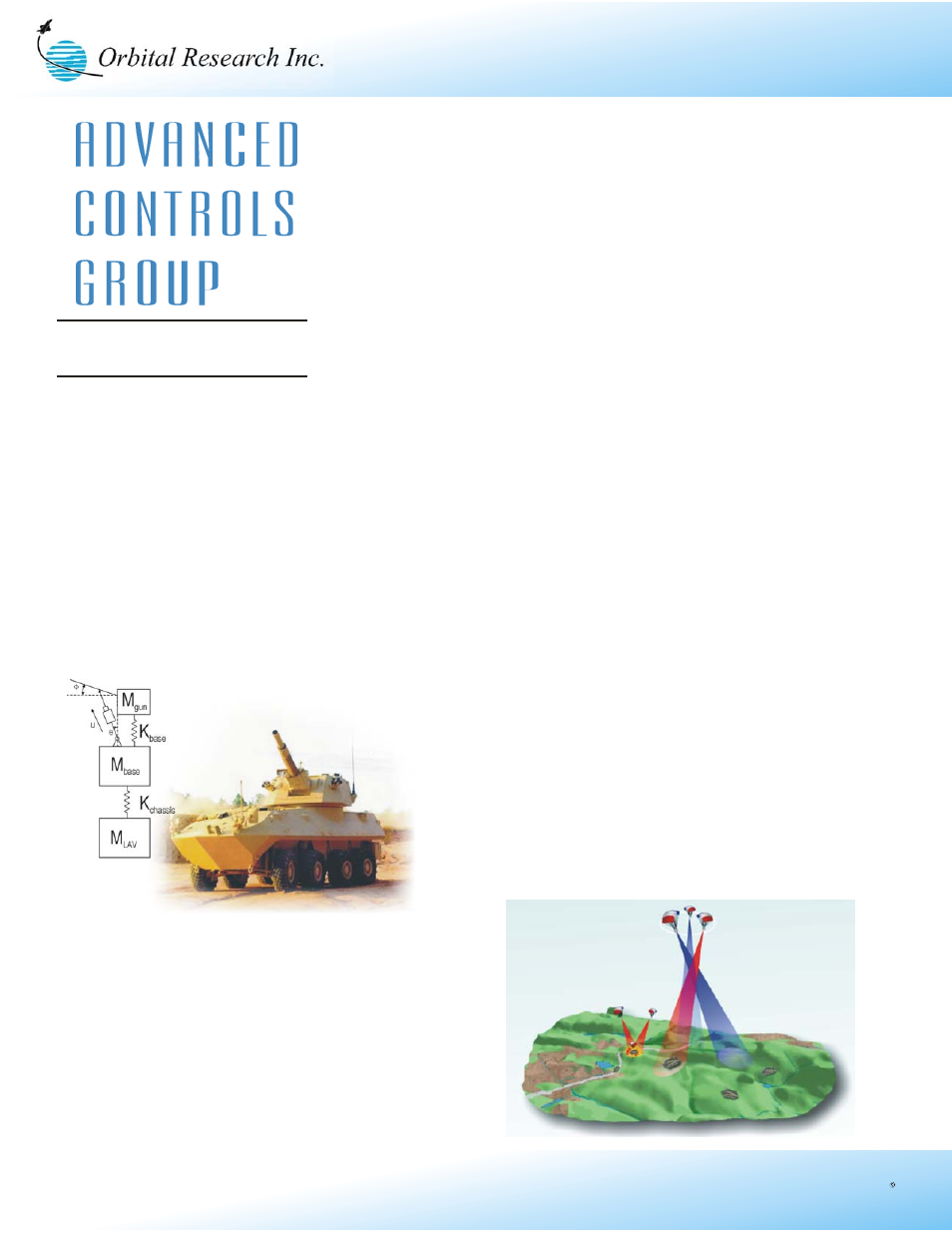
control techniques. These nonlinear controllers have
characteristics that make them particularly useful for controlling
underactuated nonlinear systems such as gun stabilizers on light-
weight, flexible gun mount.
Many systems are not readily controllable by standard control
approaches. For example, cooperative control of a group of
autonomous vehicles lacks the inherent input/output nature
assumed by traditional control design
approaches. Often, all that can be
specified a priori is some desired
outcome, not the specific actions of each
member of the group. In other cases like
Underactuated control permits effective
control of flexible light weight structures
such as stabilized gun mounts
O
rbital Research’s Advanced Controls Group creates custom control solutions
for our customers by leveraging our portfolio of proprietary control algorithms
with our extensive experience in state of the art control design. We offer a
complete range of control solutions that combines our expertise in modern control
techniques, advanced nonlinear control approaches, nontraditional methods and
artificial intelligence with our expertise in automation, GNC, and autonomous
vehicle control. We are dedicated to helping our customers achieve their goals
and develop a competitive advantage for their products by providing unmatched
control design capabilities and outstanding engineering solutions.
State-of-the-art control innovations
enabling tomorrow’s products
Swarm intelligence
enables sensor
fuzed sub mun it ion s
to collaboratively
prosecu te target s
Orbital Research, Inc.
4415 Euclid Ave., Suite 500
leveland, OH 44103-3733
C
Contact: Frederick J. Lisy, Ph.D.
Telephone (216) 649-0399
E-mail [email protected]
www.orbitalresearch.com
Copyright 2003
Rev: RMK-11-07-03