Autonomous threat avoidance and targeting, Sensor fusion for next generation navigation – Orbital Research Neural Networks For Control and Signal Processing User Manual
Page 2
Orbital Research, Inc.
4415 Euclid Ave., Suite 500
leveland, OH 44103-3733
C
Contac t: Frederick J. Lisy, Ph.D.
Telephone (216) 649-0399
E-mail [email protected]
www.orbitalresearch.com
Copyright 2003
Rev: RMK 2-2-2004
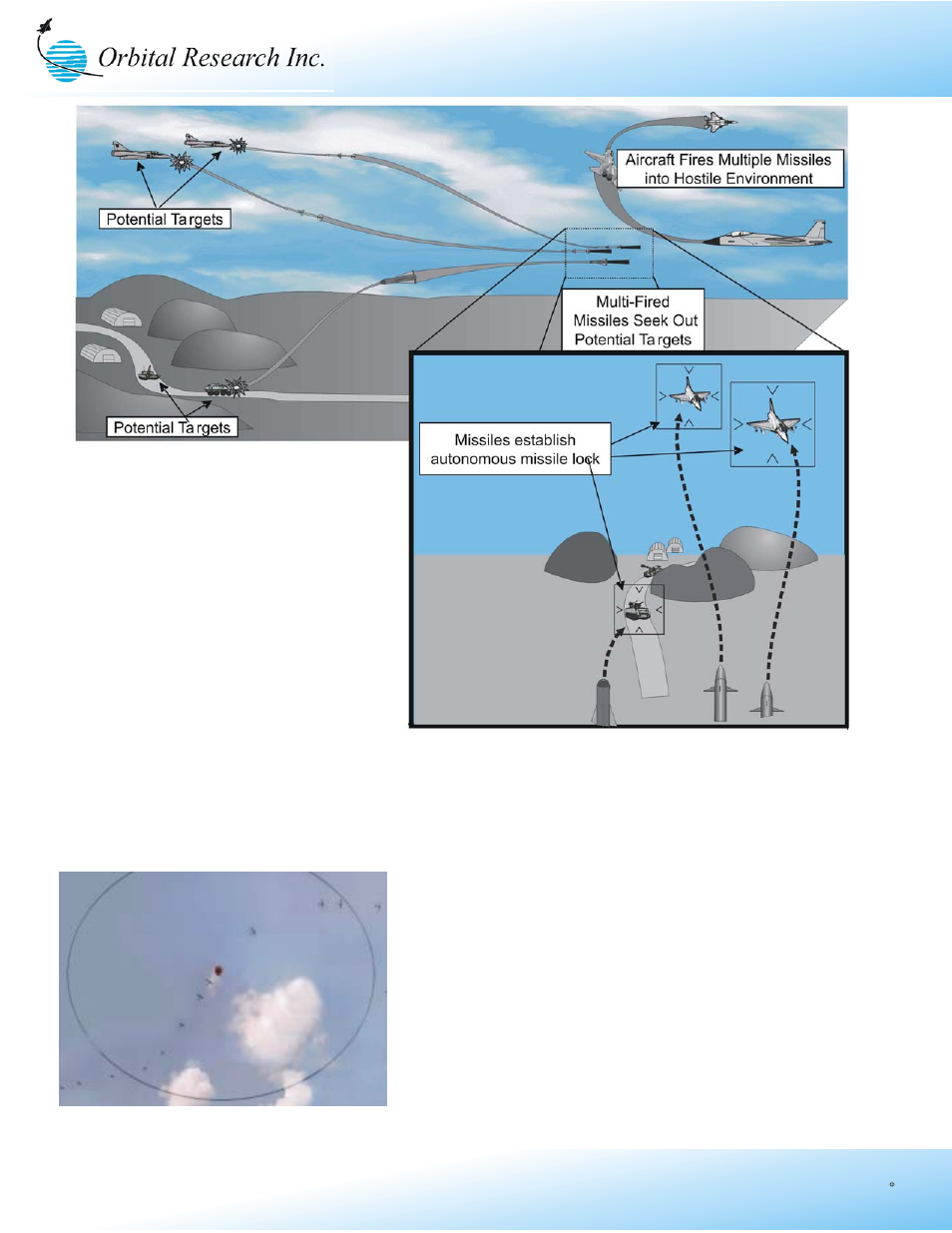
Neura l Net refl exes ena ble robust threat response a s
well a s ta rgeti ng for Unmanned Air Vehicles
Autonomous Threat Avoidance
and Targeting
Orbital Research Inc. (ORI) has developed a
revolutionary set of algorithms that produce rapid threat
avoidance and target seeking reflexes for autonomous
vehicles such as Unmanned Air Vehicles (UAV) or
Unmanned Ground Vehicles(UGV). The reflex provides
near instantaneous, context dependent integration of
sensor data and dynamic path replanning for autonomous
vehicles by mimicking the processing capabilities of
biological organisms. This work was originally generated
at Case Western Reserve University (CWRU), which
invested 20 years into studying the biological and
evolutionary development of biological organisms.
Orbital Research has transitioned the first
implementation of this technology to autonomous
vehicles for target seeking (BioSeek) and threat/obstacle
avoidance (BioAVERT). In both simulation and
demonstration flights using an unmanned air vehicle, ORI
has proven the efficacy of these artificial reflexes:
Sensor Fusion for Next Generation Navigation
Researchers at ORI are currently developing integrative architectures for
sensor fusion that take advantage of the sensor fusive capabilities and context
dependent behavior of the cockroach escape response. The unique ability to
combine contextual awareness with sensor fusion offers tremendous potential
for the development of systems that incorporate information from diverse
sources to produce coherent and accurate data. One implementation
currently under development is an Ultra Tightly Coupled GPS/INS system
that integrates GPS signal information with the raw data from Inertial
Measurement Units (IMU) to simultaneously provide robust and accurate
position data and track the GPS signal. It is believed that this system will
provide increased precision and accuracy while proving more robust to
sensor misalignment, GPS signal drop out and GPS signal jamming or spoofing.
In addition, this technology has application to many in the other sensor fusion
problems such as those occuring in the use of radar, sonar, and phase and
focal plane arrays of sensors.
Target seeking reflex shown reacting to a detected virtual
target during flight testing.