Nonsmooth adaptive control – Orbital Research Adaptive Nonlinear Control User Manual
Page 2
Orbital Research, Inc.
4415 Euclid Ave., Suite 500
leveland, OH 44103-3733
C
Contact: Frederick J. Lisy, Ph.D.
Telephone (216) 649-0399
E-mail [email protected]
power integrator
adding a power
integrator
separation principle
adding a linear integrator
backstepping
feedback domination
linear-
like parameterization
with a new parameter separation technique to
produce non-Lipschitz continuous adaptive regulators that achieve
global stability with asymptotic state regulation for cases where
there do not exist any smooth static or dynamic stabilizers.
The new results are based upon two new tools for the design of
nonlinear control systems, the technique of
and a novel
that permits the
construction of a linear-like parameterized system from a
nonlinearly parameterized system.
A new feedback design tool called
is used
to solve the problem of global robust stabilization for a significant
class of uncertain nonlinear systems that are of a lower triangular
form but neither necessarily feedback linearizable (fully or
partially) nor affine in the control input. This type of system
cannot be dealt with via conventional approaches but under
certain conditions, a globally stabilizing smooth state feedback
control law can be explicitly constructed by using the technique of
adding a power integrator.
The technique of adding a power integrator is a generalization of
the technique of
, also known as
. The technique of adding a power integrator,
however, is not a trivial extension of the integrator backstepping
technique because the two tools rely upon very different design
philosophies. To wit, traditional
techniques focus on
“
” the system at every step of the recursive
design procedure, usually by canceling the nonlinearities using
feedback. On the other hand, adding a power integrator focuses
on ways to exploit the dominant nonlinearities of the dynamic
system in the feedback design. Specifically, this technique relies
upon
rather than feedback cancellation. In
other words, rather than relying upon nonlinear feedback to
cancel nonlinearities, linear and nonlinear control terms are
designed so that the effect of the system nonlinearities is
negligible. This is crucial as the cancellation of nonlinear terms is
analogous to pole-zero cancellation in linear control design and
hence can be destabilizing in the presence of parameterization
error.
The vast majority of results presented in the literature thus far for
adaptive control focus on the design of adaptive controllers for
nonlinear systems with linear parameterization. That is to say, for
systems in which the unknown parameters appear linearly. Recent
work at CWRU introduces a novel separation principal that allows
a large class of nonlinear systems to be characterized by a
. Specifically, the work shows that every
continuous nonlinearly parameterized function
can be
dominated by two smooth bounding functions
, and ( )
, such that | (x
. Define
and the
function is decomposed as a
with respect to a new unknown parameter
. From this it follows that one can estimate the new parameter
, instead of , and design adaptive controllers directly for
the
system. It should be noted here also
that the conventional backstepping design cannot be applied to
the linear-like parameterized system because it is based upon
feedback linearization or cancellation. On the other hand, the
technique of adding a power integrator is ideally suited for the
design of adaptive controllers for linear-like parameterized
systems as it is based upon feedback domination. Due to the
nature of a domination design, one needs only knowing of the
bounding functions (i.e.
, not the precise knowledge of
the nonlinearity itself (i.e.
).
adding a power integrator
backstepping
feedback linearizing
(x )
a(x)
b
nonlinearly parameterized
linear-like
parameterized function
linear-like parameterized
a( )b
b
b
a , b
b
x ( )
( )
( )
(x) ( ))
(x
( )
Lin, W., Qian, C., “Adaptive Control of Nonlinearly Parameterized Systems: The Smooth
Feedback Case,” In IEEE Trans. On Automatic Control, Vol. 47, No. 8, pp. 1249-1266,
2002
Lin, W., Qian, C., “Adaptive Control of Nonlinearly Parameterized Systems: A Nonsmooth
Feedback Framework,” In IEEE Trans. On Automatic Control, Vol. 47, No. 5, pp. 757-774,
2002
Qian, C., Lin, W., “Non-Lipschitz continuous stabilizers for nonlinear systems with
uncontrollable unstable linearizations,” In Syst. Cont. Lett., Vol. 42, No. 3, pp. 33-48, Jan.
1993
Lin, W., Qian, C., “Adding one power integrator: a tool for global stabilization of high-order
lower-triangular systems,” In Systems and Control Letters, Vol. 39, pp. 339-351, 2000.
Lin, W., Qian, C., “Adaptive regulation of cascade systems with nonlinear
parameterization,” In Int. J. of Robust and Nonlinear Control, Vol. 12, pp. 1093-1108,
2001
Nonsmooth Adaptive Control
Adding a Power Integrator
A Separation Principle for Nonlinearly Parameterized Systems
2
2
2
2
2
2
2
2
2
2
2
2
)
)
|
Rather than identify a full set of system parameters via a filtering
approach and updating the control laws accordingly as is
commonly done, the approach described here must only identify
the value of the bounding function,
, and does so via the
construction of a
and attendant dynamics. By
reducing the identification problem to the identification of the
value of a single bounding function, a minimal parameterization is
which achieved significantly reduces computational overhead. By
relying upon a Lyapunov based adaption scheme, the identification
can be guaranteed to converge globally and hence the adaptive
controller is
Lyapunov function
Globally Asymptotically Regulating (GAR).
Adaption
www.orbitalresearch.com
Copyright 2003
Rev C: RMK-12-5-2003
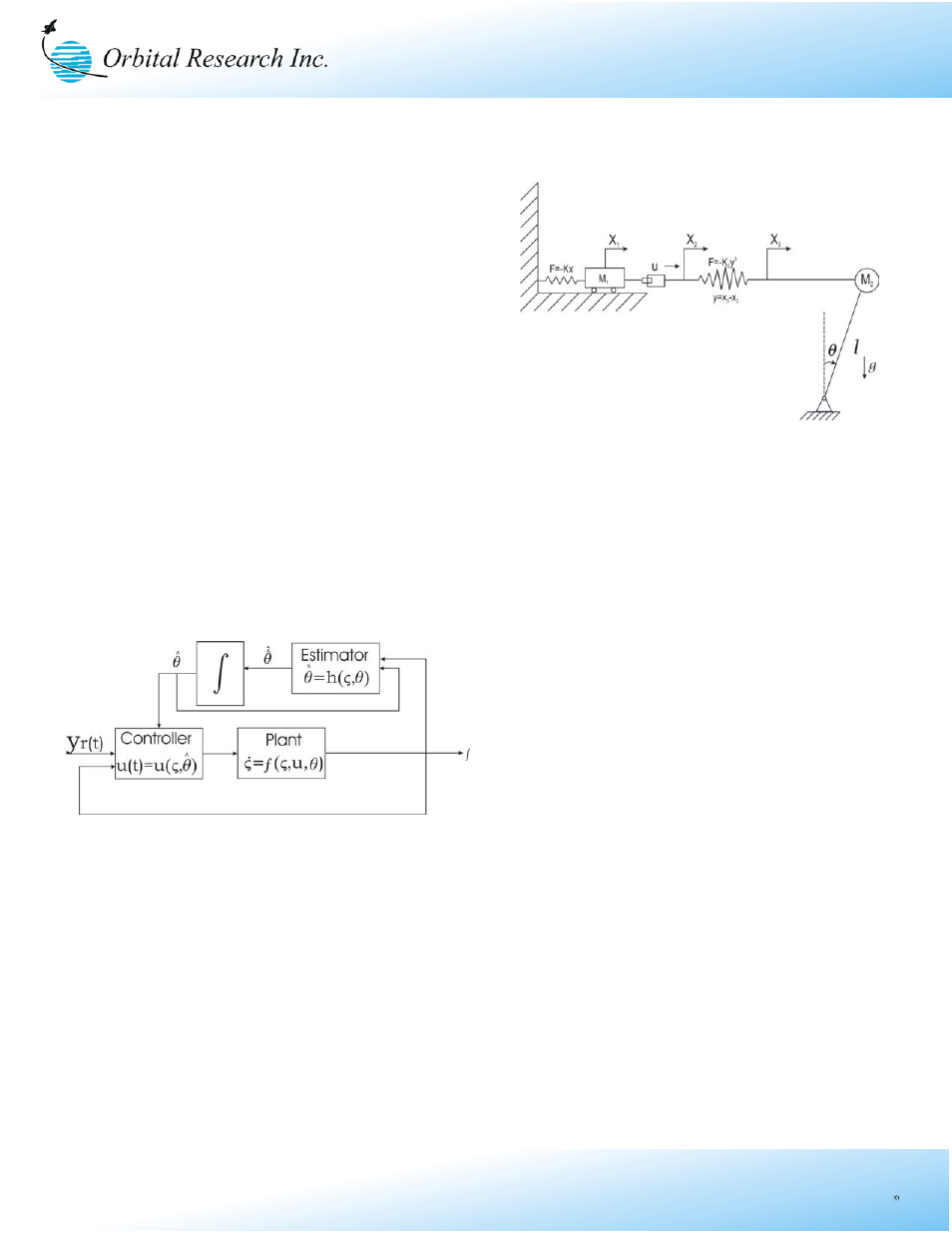
Benchmark underactuated system. The linear
approximation is unstable and uncontrollable
and hence is only controllable via nonlinear
feedback.
Block diagram of nonlinear adaptive controller