3 ethercat state machine, Ethercat state machine, Canopen over ethercat (coe) – Lenze 931K User Manual
Page 28
CANopen over EtherCAT (CoE)
EtherCAT state machine
CANopen communication objects under CoE that are not supported
l
28
KHB 13.0005−EN 1.0
8.3
EtherCAT state machine
Like in nearly all fieldbus interface connections for servo position controllers, the slave
connected (in this case the 931K servo position controller) first has to be initialised by the
master before it can be used by the master in an application. For this purpose a state
machine is implemented, defining a fixed procedure for such an initialisation.
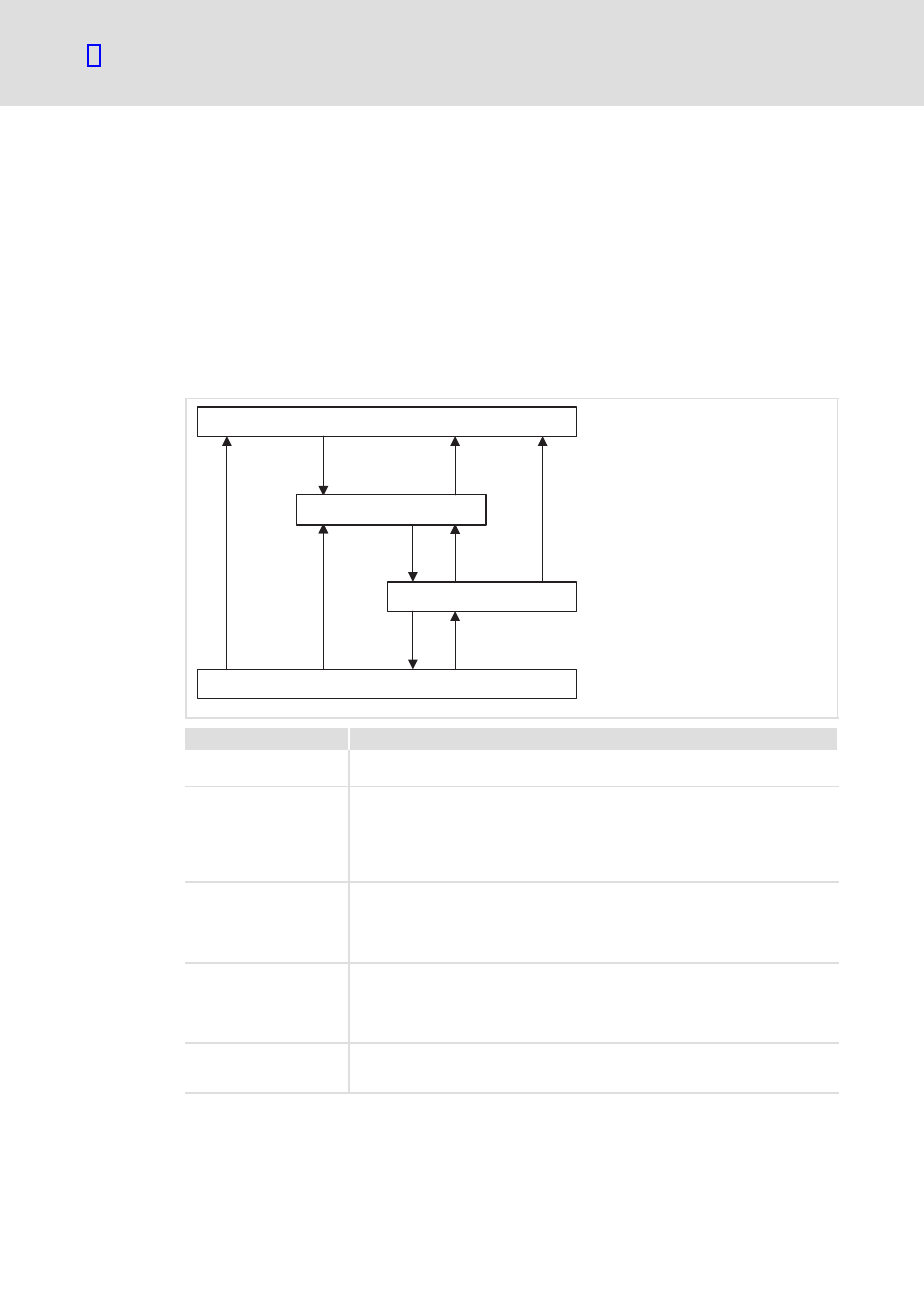
Such a state machine is also defined for the EtherCAT interface. Change−overs between the
individual states of the state machine may only take place between specific states and are
always initiated by the master. A slave may not carry out a state change on its own
initiative. The individual states and the permissible state changes are described in the
following tables and illustrations.
Operational
Pre-Operational
(IP)
(SP)
(SI)
(SO)
(PI)
(PS)
(OI)
(OP)
(OS)
Init
Safe-Operational
931K_003
Status
Description
Power on
The device has been switched on. It initialises itself and switches directly to the
"Init state.
Init
In this state the EtherCAT fieldbus is synchronised by the master. This also includes
establishing asynchronous communication between the master and the slave
(mailbox telegram protocol). There is no direct communication between the master
and the slave yet.
If all devices which are connected to the bus have been configured, a change−over to
the "Pre−operational state is effected.
Pre−operational
In this state asynchronous communication between the master and the slave is
active. This state is used by the master to establish possible cyclic communication
via PDOs and carry out required parameter settings via acyclic communication.
If this state has been passed through in an error−free manner, the master changes
to the "Safe−operational state.
Safe−operational
This state is used to set all devices that are connected to the EtherCAT bus to a safe
state. In doing this, the slave sends current actual values to the master, however, it
ignores new setpoints from the master and uses safe default values instead.
If this state has been passed through in an error−free manner, the master changes
to the "Operational state.
Operational
In this state both acyclic and cyclic communication are active. Master and slave
exchange setpoint data and actual value data. In this state the 931K can be enabled
and traversed via the CoE protocol.
Between the individual states only the following transitions are permissible.