IKA RC 2 basic User Manual
Page 12
12
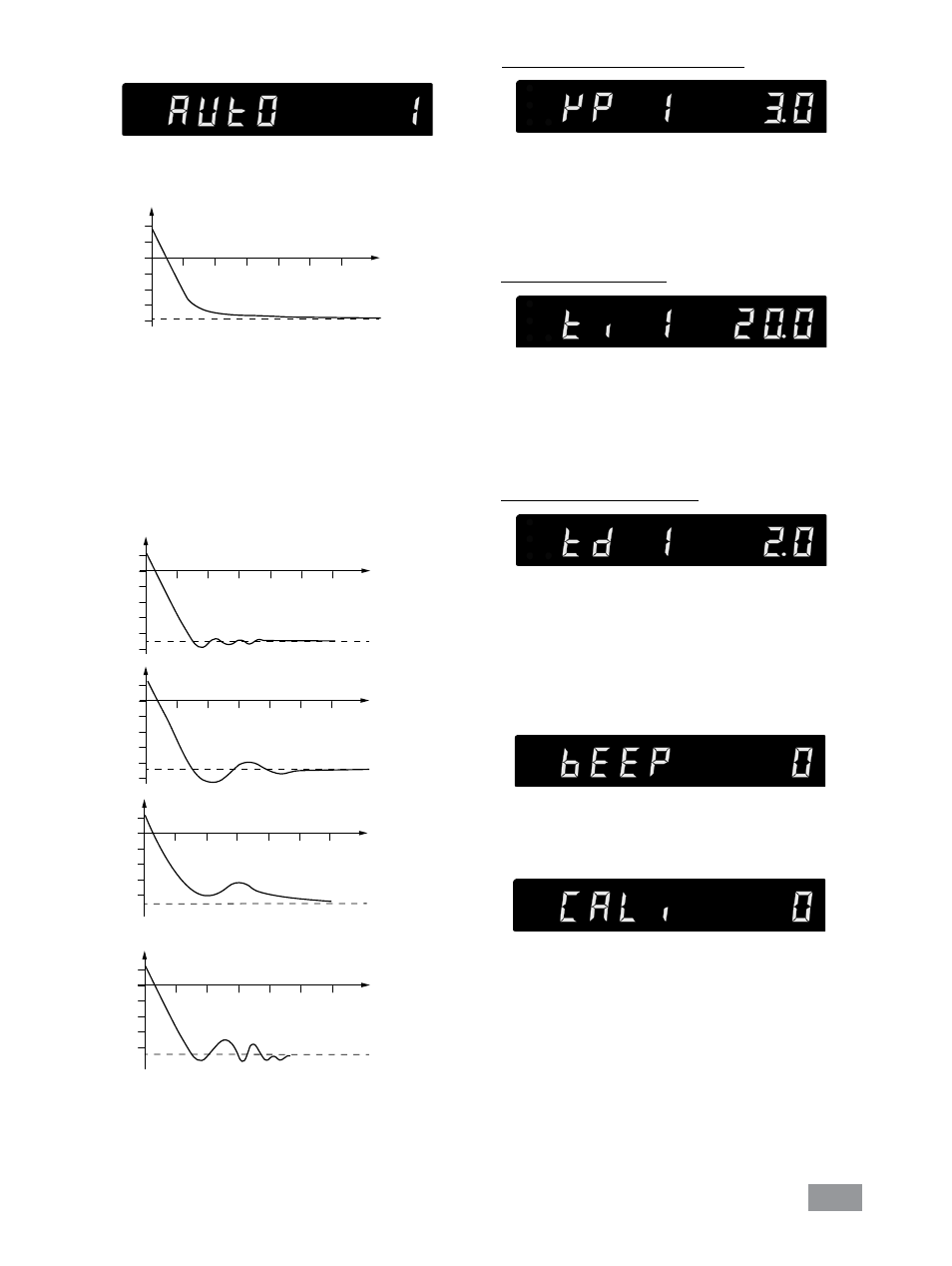
• Temperature control type (AUTO):
AUTO 1: AUTO 1 is the default setting. The default PID
settings are used automatically.
Cooling down curve in AUTO 1 control (AUTO 1):
Kp too high
°C
t
Ti too high
°C
t
Kp too low
Ti too low
°C
t
Td too high
°C
t
Fig. 13
optimum setting
°C
t
Proportional coefficient of PID (Kp 1)
Integral time of PID (Ti 1)
Differential time of PID (Td 1)
Fig. 12
The proportional coefficient Kp is the controller ampli-
fication and determines how strongly the control devia-
tion (the difference between the target temperature and
actual temperature) directly affects the control variable
(cooling down time). Kp values that are too large can
lead to the controller overshooting.
The integral time Ti (s) is the correction time and deter-
mines how strongly the duration of the control devia-
tion affects the control variable. Ti compensates an ex-
isting control deviation. A high Ti means a smaller and
slower effect on the control variable. Ti values that are
too small can lead to instability of the controller.
The differential time Td (s) is the derivative time and de-
termines how strongly the rate of change of the control
deviation affects the control variable. Td compensates
for rapid control deviations. A high Td means a smaller
and slower effect on the control variable. Td values that
are too small can lead to instability of the controller.
AUTO 0: For special requirements, AUTO 0 can be used
with manual adjustment of the control parameters.
If the PID control (AUTO 0) option is selected, the fol-
lowing items including Kp 1, Ti 1 and Td 1 could be
set. Otherwise they are not displayed in the menu list.
Note: Inappropriate settings may produce the follow-
ing cooling down curves:
• Alarm and key tone (BEEP):
BEEP 0: no alarm and key tone
BEEP 1: alarm and key tone is activated
• Calibration and adjustment (CALI):
CALI 0: Reset calibration
CALI 2: 2-point calibration
CALI 3: 3-point calibration