Failsafe, Servo reversing – Spektrum SPMR2200 DX2M User Manual
Page 6
6
EN
4. Press and hold the bind button on the top of the transmitter while turning
on the power switch. Release the bind button once the LEDs on the front of
the transmitter flash and you hear a series of beeps. Within a few seconds
the system should connect. Once connected, the LED on the receiver will go
solid indicating the system is connected.
CAUTION: Continuing to hold the bind button during the binding
process prevents preset failsafe positions from being learned by the receiver.
5. Remove the bind plug from the BATT/BIND port on the receiver before you
power off the receiver. Store the plug in a convenient place.
Note: You must rebind when:
• Different failsafe positions are desired e.g,. when throttle or steering
reversing has been changed.
• Changing receiver types e.g., changing from a DSM receiver to a
DSM2 or Marine receiver.
• Binding the receiver to a different transmitter.
Note: Some Spektrum receivers like the SR3001 use a bind button rather
than a bind plug. The binding process is the same with this receiver.
However, instead of inserting the plug before powering up the receiver, press
and hold the bind button while powering up the receiver to enter bind mode.
FAILSAFE
Failsafe positions are also set during binding. In the unlikely event that the radio
link is lost during use, the receiver drives the servos to their preprogrammed
failsafe positions (normally full brakes and straight steering). If the receiver is
turned on prior to turning on the transmitter, the receiver enters failsafe mode,
driving the servos to their preset failsafe positions. When the transmitter is
turned on, normal control is resumed. Failsafe servo positions are set during
binding (see Binding on the previous page).
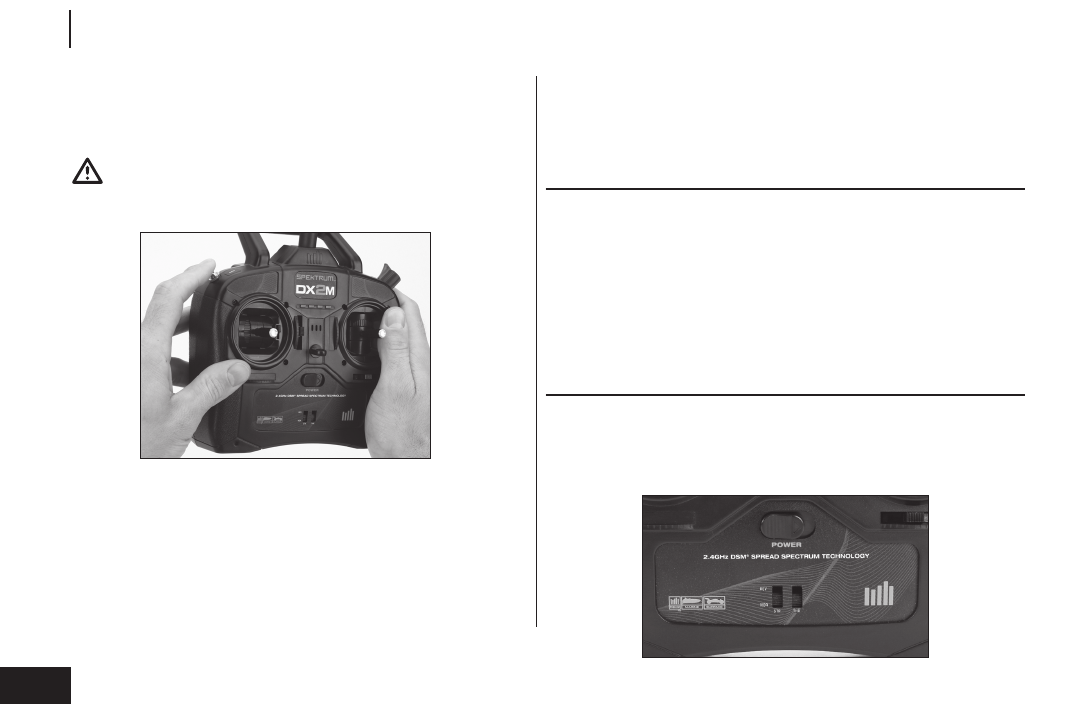
SERvO REvERSING
The DX2M features servo reversing on the throttle and steering channels. The
switches are located at the lower front of the transmitter. They are used to select
the servo direction of each channel. You can change the switch position to
normal (NOR) or reverse (REV).