VEGA VEGACAL 67 Foundation Fieldbus User Manual
Page 41
41
10 Supplement
VEGACAL 67 • Foundation Fieldbus
31760-EN-130917
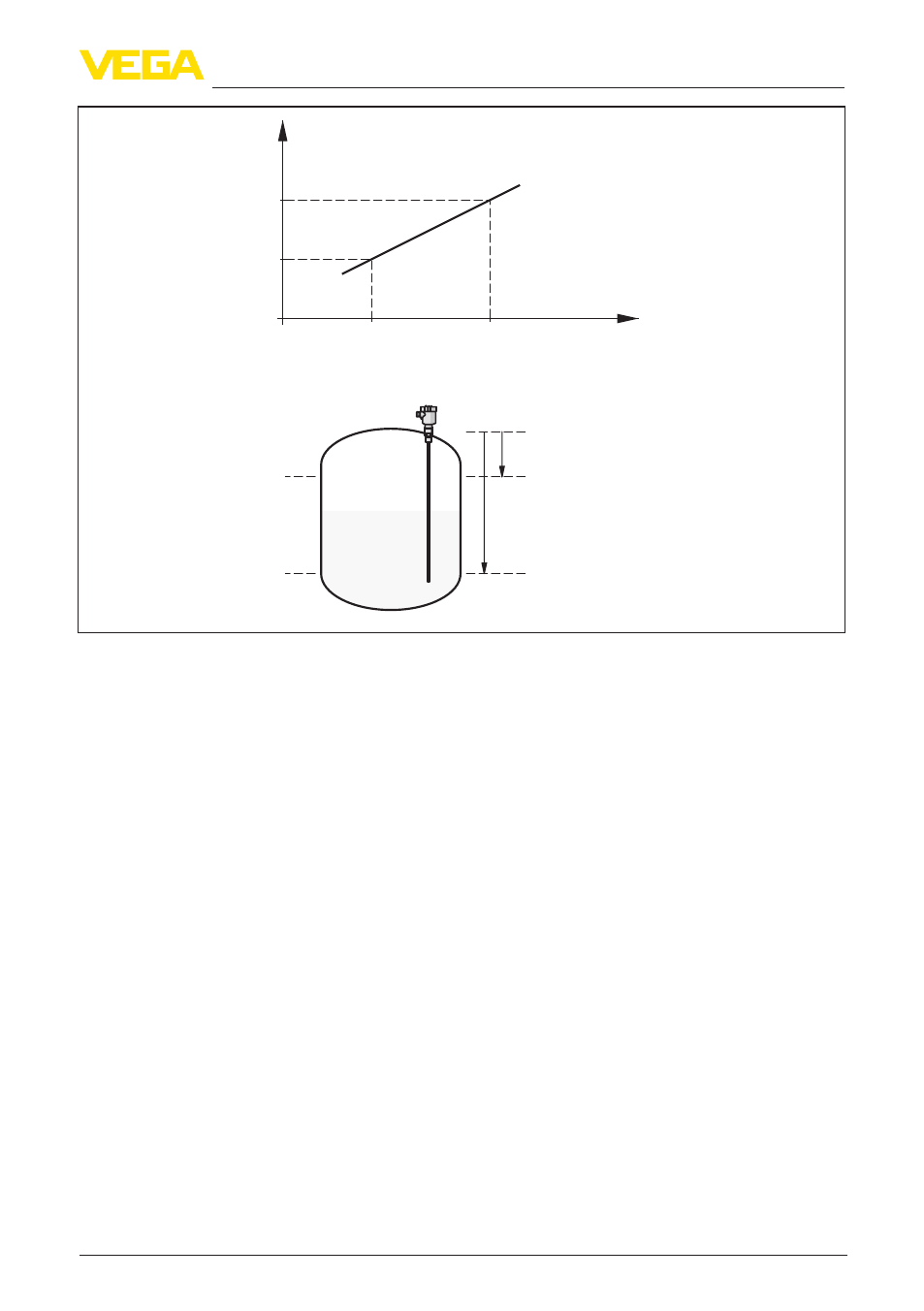
Secondary_value_1
Calibration
Lowest Point
Calibration
Highest Point
Sensor_value
cal_level_lo
cal_level_hi
Calibration
Lowest Point
Calibration
Highest Point
Sensor reference plane
cal_level_lo [%]
cal_level_hi [%]
Fig. 22: Adjustment VEGACAL 67
Parameter list
The following list contains the most important parameters and their meaning:
•
primary_value
– This is the process value after adjustment and Linearization with the status of the transducer
block
– It is the input for the AIFB when CHANNEL = 1 is selected
– The unit is defined in "primary_value_unit"
•
primary_value_unit
– Selected unit code for "primary_value"
•
secondary_value_1
– This is the process value after adjustment with the status of the transducer block
– It is the input for the AIFB when CHANNEL = 2 is selected
– The unit is defined in "secondary_value_2_unit"
•
secondary_value_1_unit
– Selected unit code for "secondary_value_1"
•
secondary_value_2
– This is the distance value (sensor_value) with the status of the transducer block
– It is the input for the AIFB when CHANNEL = 3 is selected
– The unit is defined in "secondary_value_2"
•
secondary_value_2_unit
– Selected unit code for "secondary_value_2"
•
sensor_value
– This is the distance value of the sensor
– The unit is defined in "sensor_range.Units Index"
•
sensor_range