Before making service call, Specifications – Toshiba CMOS Color Camera IK-HR1D User Manual
Page 26
26
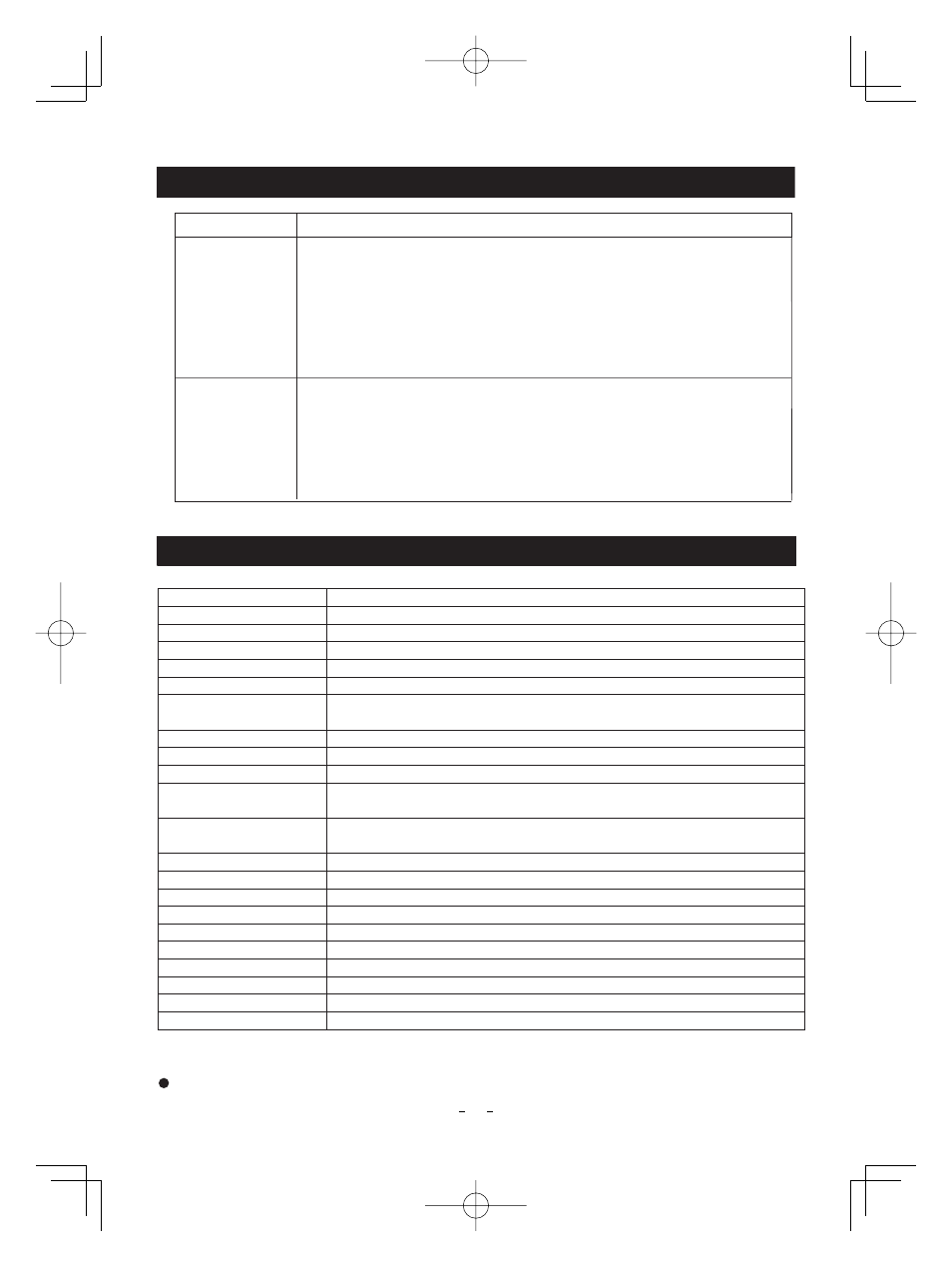
Items to be checked
Symptom
No picture
䍃 Is power supplied correctly?
䍃 Is the lens iris adjusted correctly?
䍃 Are the camera and video cables connected correctly?
䍃 Is the shutter mode set correctly?
Is I/P mode set correctly?
䍃
䍃
Is the monitor on, and in working condition?
Poor color
䍃 Is the monitor adjusted correctly?
䍃 Is the white balance of the camera adjusted correctly?
(in modes other than automatic tracking)
䍃 Is the matrix color correction set correctly?
䍃 Is the illumination sufficient?
8. BEFORE MAKING SERVICE CALL
Power supply
12V DC
㫧10% (The maximum voltage must not exceed 16V DC.)
Power consumption
Approx. 4.2 W
Image sensor
1/3 inch color CMOS sensor (Rolling shutter)
Output pixels
Horizontal : 1920, Vertical : 1080
Scanning system
Progressive
Signal system
1080/59.94i, 1080/59.94p
Scan frequency
Horizontal : 67.43 kHz, Vertical : 59.94 Hz
Sync system
Internal
Sensitivity
F 4 standard (2000 lx, 3000K)
Minimum illumination
16 lx standard (50 IRE, F1.4, gain
㧗12 dB,
gamma setting ON (setting value 0), 3000 K)
SN ratio
54 dB standard (gain 0 dB Y-conversion*)
Lens mount
C mount
Operating temperature
(32
㫦
㫦F)
to 40
0
F to 104
㷄
㷄
Operating humidity
Less than 90% (non condensing)
Weight
Approx. 146 g (0.322 lbs)
External dimension
44(W) × 44(H) × 78(D) mm (1.73”(W)
㬍㩷1.73”(H) 㬍㩷3.07”(D) )
Scene file
A, B, C, D, E
White balance
ATW
䋨Automatic tracing white balance䋩, AWB䋨Automatic white balance䋩,
MANUAL
䋨Manual䋩
Gain
MANUAL (Manual), OFF (0 dB)
Output signal
DVI-I (Digital RGB, Analog RGB) DVI-I terminal
Sync signal output
H SYNC : 5 V + 0.5 V / -1.0 V (Positive polarity) DVI-I terminal
V SYNC : 5 V + 0.5 V / -1.0 V (Positive polarity) DVI-I terminal
Remote control
Serial data interface (RS232C)
Design and specifications are subject to change without notice.
9. SPECIFICATIONS
* The SN ratio is calculated using a Y signal. Because this camera outputs a RGB signal, the Y is calculated using the following
mathematical formula: Y=xR+yG+zB (where x, y and z are coefficients).