Appendix c: rs‑232 connection – Orion SIRIUS 9995 User Manual
Page 25
25
appendix c: rs‑232
connection
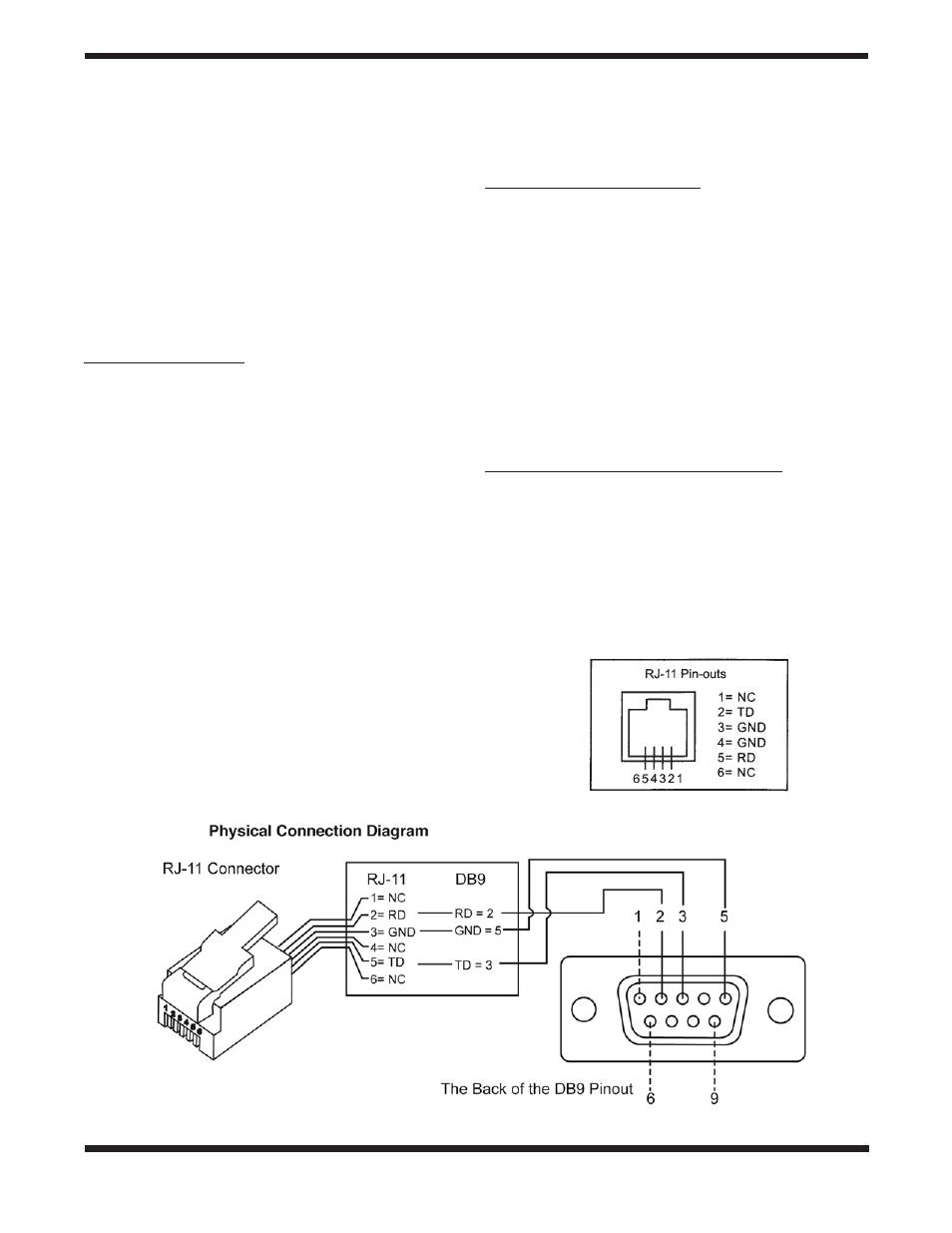
The Sirius EQ-G mount equipped with the GoTo hand control-
ler are designed to receive commands sent from a computer’s
RS-232 COM port (via the computer interface cable). The hand
controller will communicate with the computer at 9600 bits/sec,
no parity, no stop bit. All angles are communicated with 16 bits
and communicated using ASCII hexadecimal. The chart below
shows the ASCII commands from the PC, and what the hand
controller’s response will be.
additional rs‑232 commands
Sending a Tracking Rate
1. Multiply the desired tracking rate (arcseconds /second) by
4. For example: if the desired track rate is 120 arcseconds/
second (approximately 8 times sidereal rate), then the
TRACKRATE = 480.
2. Separate TRACKRATE into two bytes, such
that (TRACKRATE = TrackRateHighByte*256 +
TrackRateLowByte). For example, if TRACKRATE = 480,
then TrackRateHighByte = 1 and TrackRateLowByte = 224.
3. To send a tracking rate, send the following 8 bytes:
a. Positive Azm tracking: 80, 3, 16, 6, TrackRateHighByte,
TrackRateLowByte, 0, 0
b. Negative Azm tracking: 80, 3, 16, 7, TrackRateHighByte,
TrackRateLowByte, 0, 0
c. Positive Alt tracking: 80, 3, 17, 6, TrackRateHighByte,
TrackRateLowByte, 0, 0
d. Negative Alt tracking: 80, 3, 17, 7, TrackRateHighByte,
TrackRateLowByte, 0, 0
4. The number 35 is returned from the hand controller.
Sending a Slow-GoTo Command
1. Convert the angle position to a 24 bit number. Example:
if the desired position is 220, then POSITION_24BIT =
(220/360)*224 = 10,252,743
2. Separate POSITION_24BIT into three bytes such that
(POSITION_24BIT = PosHighByte * 65536 + PosMedByte
* 256 + PosLowByte). Example: PosHighByte = 156,
PosMedByte = 113, PosLowByte = 199
3. Send the following 8 bytes:
a. Azm Slow Goto: 80, 4, 16, 23, PosHighByte, PosMedByte,
PosLowByte, 0
b. Alt Slow Goto: 80, 4, 17, 23, PosHighByte, PosMedByte,
PosLowByte, 0
4. The number 35 is returned from the hand controller.
Resetting the Position of Azimuth or Altitude
1. Convert the angle position to a 24bit number, same as Slow-
Goto example.
2. Send the following 8 bytes:
a. Azm Set Position: 80, 4, 16, 4, PosHighByte,
PosMedByte, PosLowByte, 0
b. Alt Set Position: 80, 4, 17, 4, PosHighByte, PosMedByte,
PosLowByte, 0
3. The number 35 is returned from the hand controller.