Gps dr (uart a) input command, 1 $mmf, Rdr-3200 user manual – RoyalTek PANASONIC GYRO RDR-3200 User Manual
Page 19
RDR-3200 User Manual
GPS DR (UART A) Input command
The input command is used to let the navigation program send command to DR.
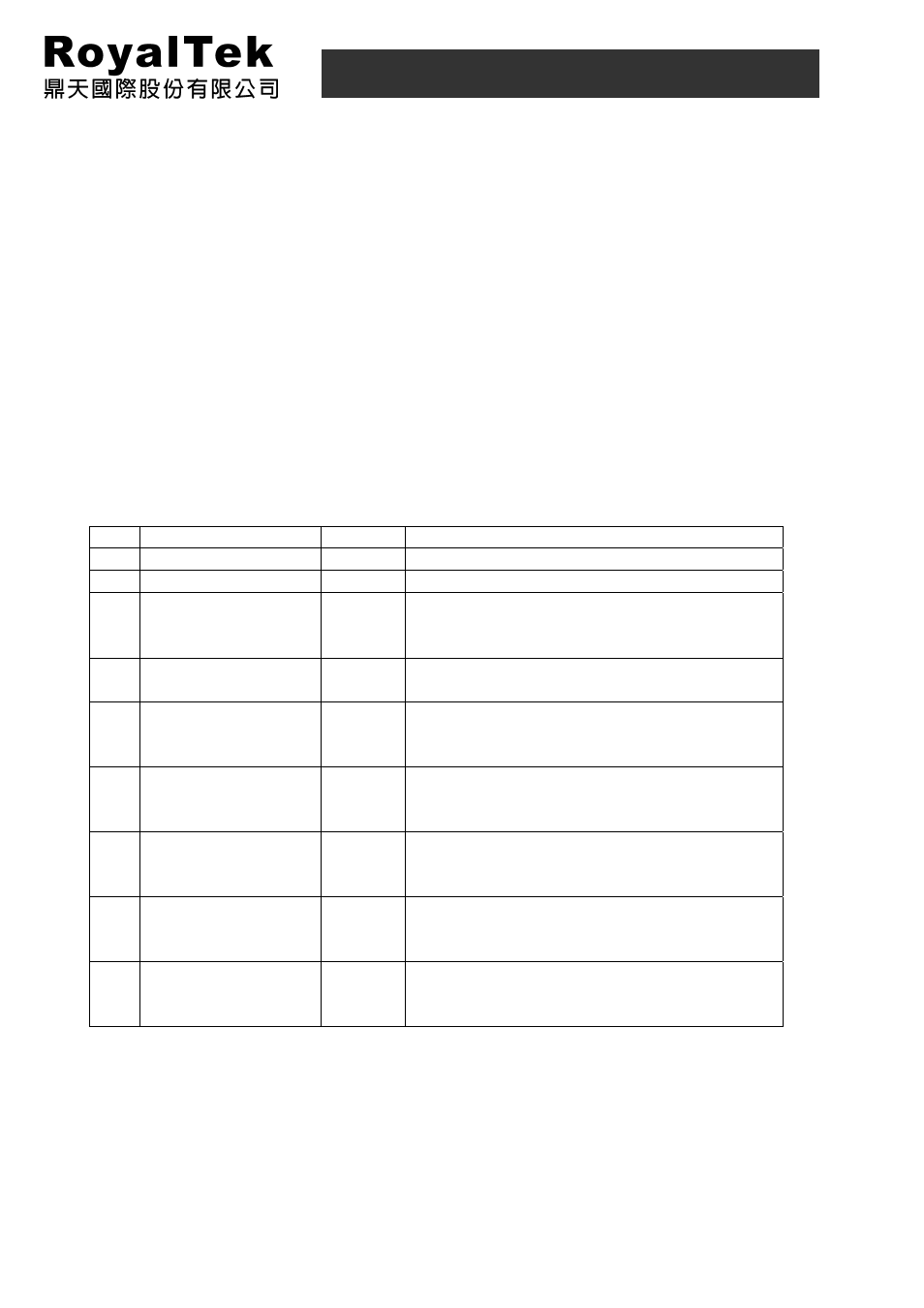
8.2.1 $MMF
This MMF command is used to let the navigation program send the map matching
information to the DR module to update the current position and azimuth angle of device
using known information. Please refer to section 2.2 Calibration of DR using digital map
information for further information.
$MMF, Delta_Latitude,A,Delta_Longitude,A,Delta_ Cog,A*ck
Item Field Length
Description
1
$
1
Beginning of sentence
2 MMF
5 Message
Header
The correction of latitude value to calibrate DR
position that generated by map. Value the unit is
1.0e-6 degree
Delta Latitude
3
7
(ddddddd)
A: use above value to calibrate the DR Latitude
4 A
1
V: Do not use.
The correction of longitude value to calibrate
DR position that generated by map. Value the
unit is 1.0e-6 degree
Delta Longitude
5
8
(dddddddd)
A: use above value to calibrate the DR
Longitude
6 A
1
V: Do not use.
The correction angle (COG) of current
movement to calibrate DR Heading that
generated by map. Value the unit is 0.1 degree.
7 Del_Cog
4
A: use above value to calibrate the DR
Longitude
8 A
1
V: Do not use.
Check Sum and sentence termination delimiter.
The algorithm of checksum calculation is same
with the one to calculate NMEA checksum.
9 *CC
5
Example:
Example:
=> If current DR position is (24.106928 N, 120.299588 E) with COG=213.19 degree
=> $MMF,156,A,288,A,10,A*2D
=> It will set the DR position to (24.119842 N, 120.301837 E) with COG = 214.19 degree.
RoyalTek Confidential
19