2 acquisition times, 3 timing 1pps output, 4 battery backup (sram/rtc backup) – Navman LA000508 User Manual
Page 7: 5 tricklepower mode, 1 adaptive tricklepower mode, 2 push‑to‑fix mode, Table 3‑1: ttff acquisition times, 1 adaptive tricklepower, Mode
LA000507G © 2006 Navman New Zealand. All rights reserved. Proprietary information and specifications subject to change without notice.
3.2 Acquisition times
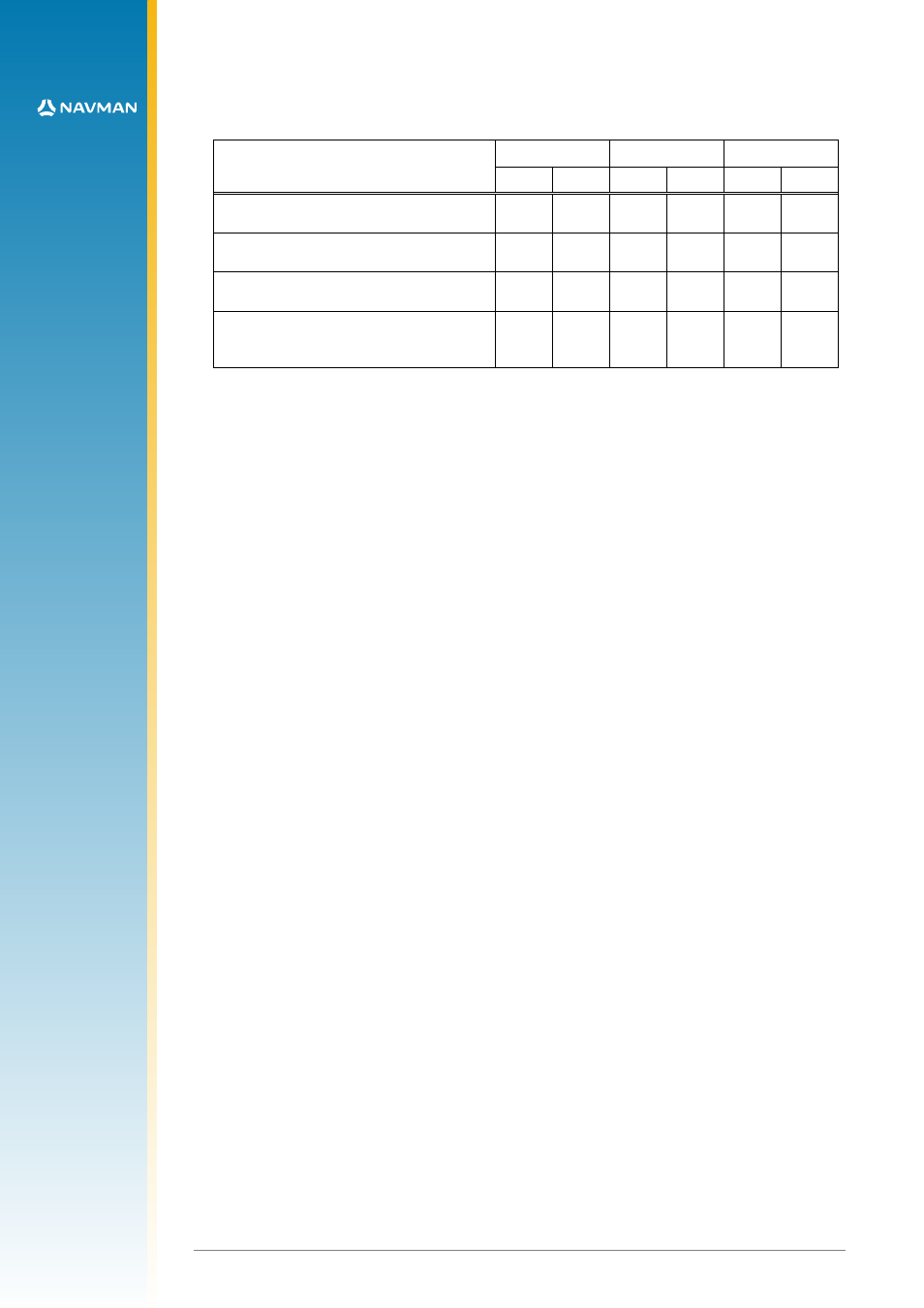
Table 3‑1 shows the corresponding TTFF times for each of the acquisition modes.
Mode
J20
J20S
J20D
Typ
90%
Typ
90%
Typ
90%
TTFF hot
(valid almanac, position, time & ephemeris)
8 s
12 s
8 s
12 s
8 s
12 s
TTFF warm
(valid almanac, position & time)
38 s
42 s
38 s
40 s
35 s
40 s
TTFF cold
(valid almanac)
44 s
55 s
45 s
56 s
52 s
70 s
re‑acquisition
(<10 s obstruction with valid almanac,
position, time & ephemeris)
100 ms 100 ms 100 ms 100 ms 100 ms 100 ms
Table 3-1: TTFF acquisition times
3.3 Timing 1PPS output
The 1PPS (Pulse Per Second) output of the Jupiter 20 receiver is < 1 µs, typical ± 300 ns in
reference to UTC (Coordinated Universal Time). This feature is currently only available on the
Jupiter 20 standard module.
3.4 Battery backup (SRAM/RTC backup)
During powered down conditions, the SRAM and RTC may be kept operating by supplying
power from the VBATT as shown in Table 4‑1. The Jupiter 20 can accept slow VBATT supply
rise time (unlike many other SiRFstarII based receivers) due to an on‑board voltage detector.
3.5 TricklePower mode
During normal mode of operation the Jupiter 20 is continuously running, providing a navigation
solution at the maximum rate of once per second. This continuous mode provides no power
saving.
The TricklePower mode of operation can be enabled to reduce the average power consumption.
The main power is supplied to the module continuously. An internal timer wakes the processor
from sleep mode. The module computes a navigation position fix, after which the processor
reverts to sleep mode. The duty cycle is controlled by a user‑configurable parameter.
If ephemeris data becomes outdated, the TricklePower mode will attempt to refresh the data set
within every 30‑minute period, or for every new satellite that comes into view.
With TricklePower set to a 20% duty cycle, a power saving of 50% can easily be achieved with
minimal degradation in navigation performance.
3.5.1 Adaptive TricklePower
mode
In Adaptive TricklePower mode, the processor automatically returns to full power when signal
levels are below the level at which they can be tracked in TricklePower mode. This is the
default behaviour when TricklePower is active.
3.5.2 Push-To-Fix mode
Unlike TricklePower, the operation in this mode is not cyclic. This mode always forces the
GPS software to revert to a continuous sleep mode after a navigation position fix. It will stay
in sleep mode until woken by activation of the reset input, and compute a fresh position.
If the ephemeris data becomes invalid, the RTC has the ability to self activate and refresh the
data, thus keeping the restart TTFF very short.
This mode yields the lowest power consumption of the module, and is ideal where a battery
powered application requires very few position fixes.
For further information on the TricklePower and Push‑To‑Fix modes refer to the Low Power
Operating Modes application note (LA000513).