Preparations and adjustments, Applicability of automatic adjustment – Panasonic MDDDT5540 User Manual
Page 51
- 51 -
The auto gain tuning affects the values of the following six parameters.
•
Pr15 (Velocity Feed Forward) will be automatically changed to 0%, if the auto gain tuning is
executed.
< N o t e s >
The real time auto gain tuning will be disabled in the following cases:
1) Running pattern at a constant speed
2) Running pattern with a small acceleration/deceleration
Relationship between Gain Adjustment and Mechanical Stiffness
To increase the mechanical stiffness,
1) The machine (motor load) should be firmly secured to a rigid foundation.
2) The coupling between the motor and machine should be a high-stiffness special one designed
for servo motors.
3) The timing belt should have a larger width. The tension of the timing belt should be adjusted
according to the allowable axial load of the motor.
4) The gears should have a smaller backlash characteristic.
• The inherent frequency (resonance) of the machine significantly affects the gain adjustment of the
servo motor. If the machine has a lower resonance frequency (i.e. lower stiffness), you can't set
the high response of the servo system.
Preparations
and
Adjustments
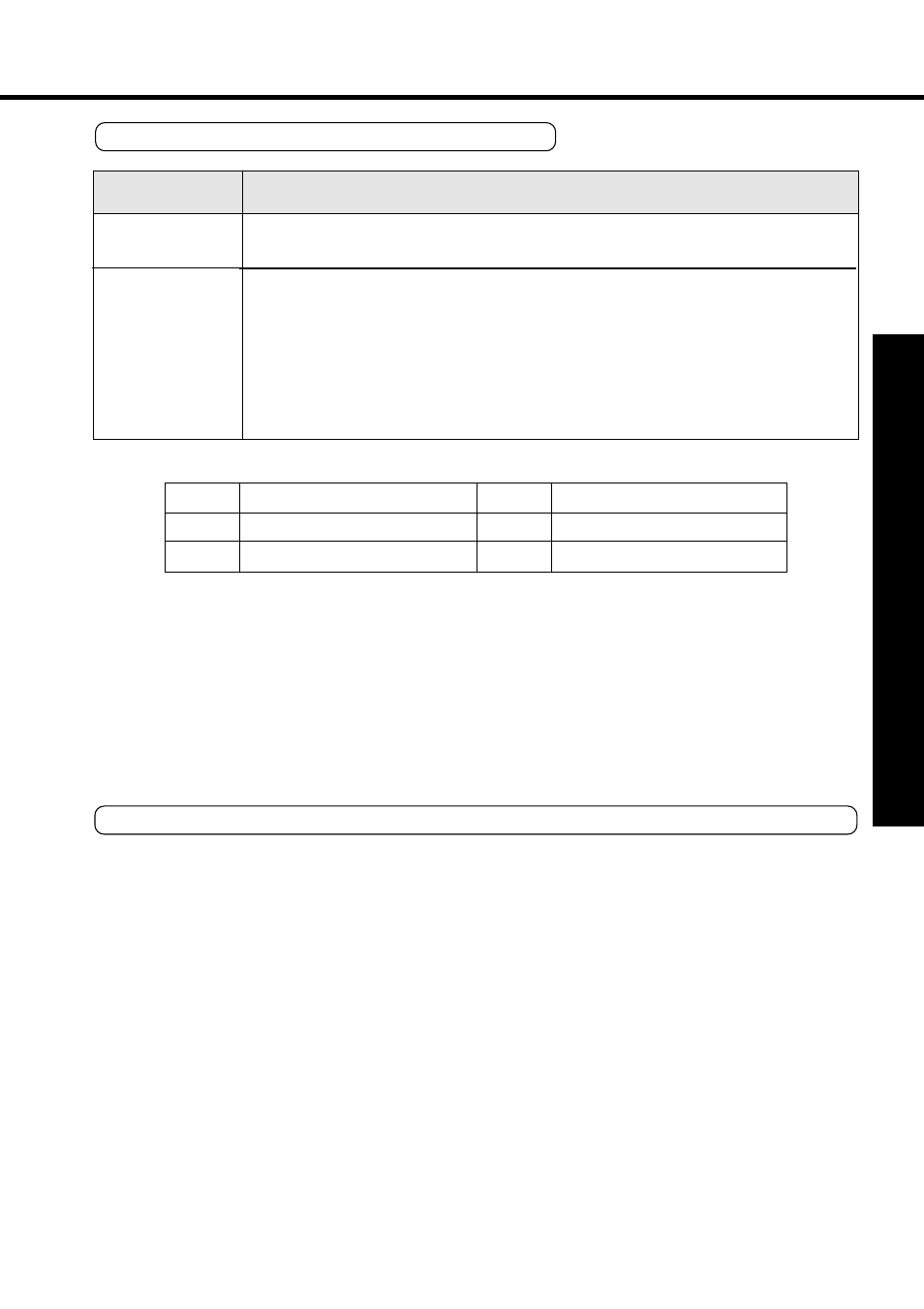
Applicability of Automatic Adjustment
P r 1 0
1st Position Loop Gain
P r 1 3
1st Speed Detection Filter
P r 1 1
1st Velocity Loop Gain
P r 1 4
1st Torque Filter Time Constant
P r 1 2
1st Velocity Loop Integration Time Constant
P r 2 0
Inertia Ratio
I t e m
C o n d i t i o n s
• Must be at least three times as large as the motor inertia, but not greater than 20 times.
• Must not fluctuate much
• The machine (motor load) and its coupling must have a higher mechanical stiffness.
• The backlash of the gears and other equipment must be small.
• Eccentric load must be smaller than one-fourth of the rated torque.
• The viscous load torque must be smaller than one-fourth of the rated torque.
• Any oscillation must not cause any mechanical damages of the machine (motor load).
• Two CCW turns and subsequent two CW turns must in no case cause any troubles.
Load inertia
L o a d