Metrologic Instruments IS4921 User Manual
Page 31
25
The TTL version of the decode engine does not have an on board microcontroller to control the power to the
decode platform and imaging engine. As such, the TTL version can only enter Boot Mode in response to
signals from the host (nTrig or nWake). When VIN is initially applied with the nWake and nTrig signals held
high, the unit will be in the Power Down Mode. In this state, the PWRDWN signal will be high and all other
output signals will be in their default state. By bringing either the nTrig or nWake signal low, power will be
applied to the entire system and the unit will enter the Boot Mode. The nTrig or nWake signal will need to be
held low continuously for approximately two seconds at which time the decode engine will take control of the
internal power circuitry. At this point, the nTrig and nWake signals can be used with out interrupting the power.
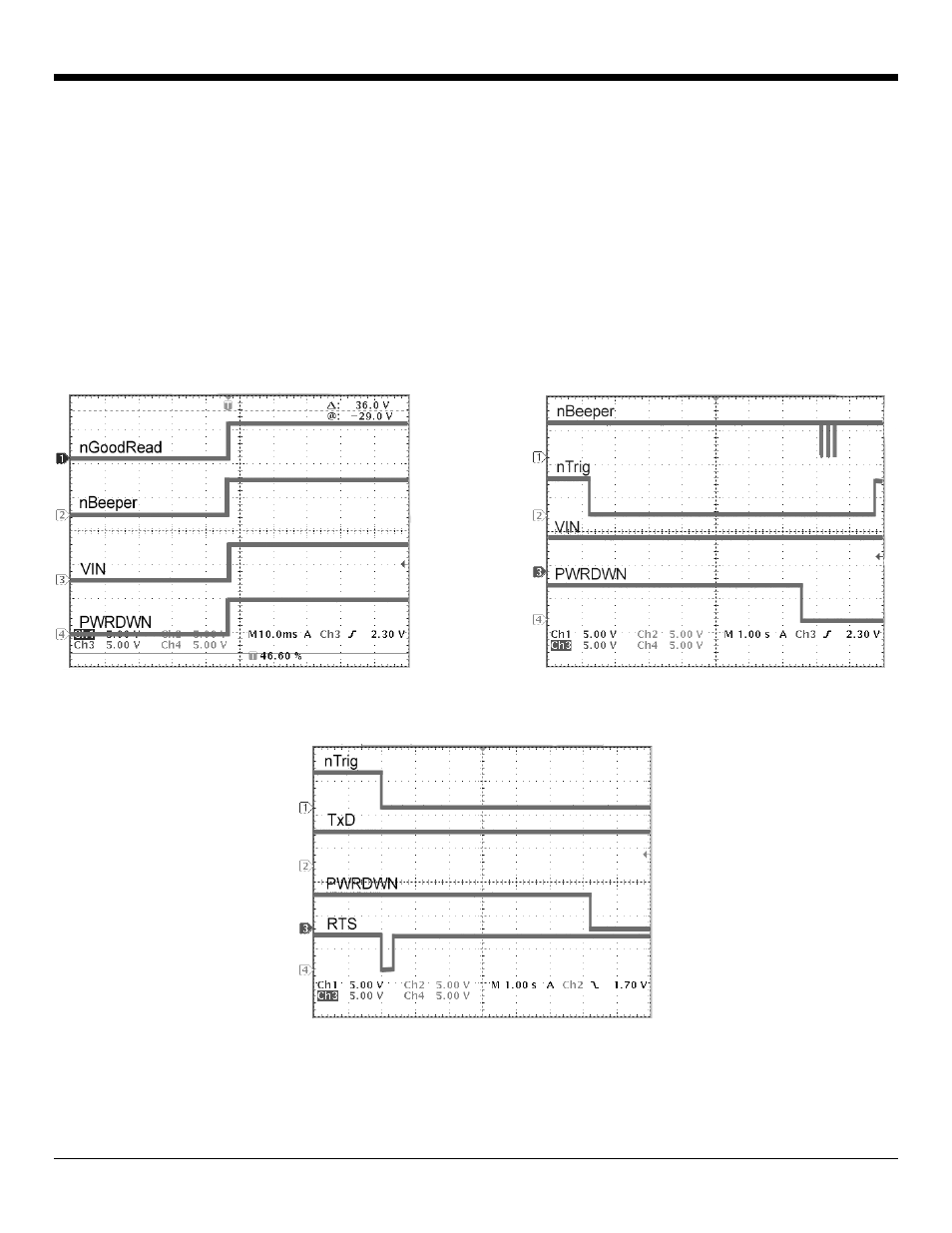
Figures 21 - 23 show the state several host signals when power is first applied and when the unit enters boot
mode.
Note: The default state of TxD depends on the 232INV signal. When 232INV is low, the default state of TxD
is high. When INV is high, the default state of TxD is low.
Figure 23. Transmit and RTS during Boot
Up forTTL Version (Vin= 5V)
Figure 21. Power First Applied of TTL
Version (Vin= 5V)
Figure 22. Boot Up Sequence of TTL Version
(Vin= 5V) initiated by nTrig