Table 3, Controller communications commands continued – GE CTR 80 User Manual
Page 54
whether or not a value is sent with the command following a “=” character. For
example “s”
the set-point to 150.0 degrees.
In the following list of commands, characters or data within brackets, “[” and
“]”, are optional for the command. A slash, “/”, denotes alternate characters or
data. Numeric data, denoted by “n”, may be entered in decimal or exponential
notation. Characters are shown in lower case although upper case may be used.
Spaces may be added within command strings and will simply be ignored.
Backspace (BS, ASCII 8) may be used to erase the previous character. A termi-
nating CR is implied with all commands.
51
10 Digital Communication Interface
Command Description
Command
Format
Command
Example
Returned
Returned
Example
Acceptable
Values
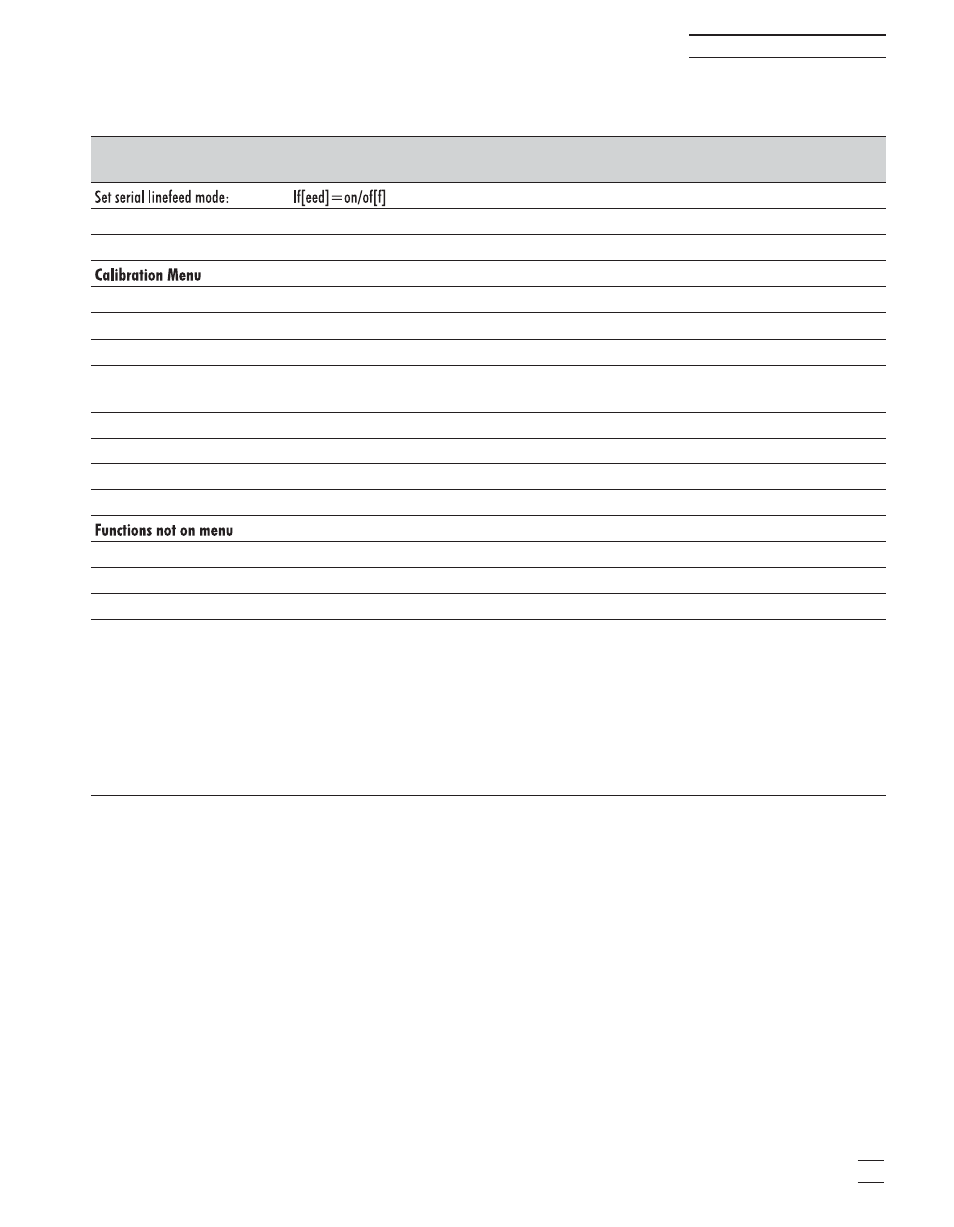
ON or OFF
Set serial linefeed mode to on
lf[eed]=on
lf=on
Set serial linefeed mode to off
lf[eed]=of[f]
lf=of
Read R0 calibration parameter
r[0]
r
r0: 999.999
r0: 100.578
Set R0 calibration parameter to
n
r[0]=n
r=100.324
90 to 110
Read ALPHA calibration parameter al[pha]
al
al: 9.9999999
al: 0.0038573
Set ALPHA calibration parameter
to
n
al[pha]=n
al=0.0038433
.002 to .005
Read DELTA calibration parameter de[lta]
de
de:9.99999
de: 1.507
Set DELTA calibration parameter
de[lta]=n
de=1.3742
0–3.0
Read BETA calibration parameter
be[ta]
be
be:99.999
be:03427
Set BETA calibration parameter
be[ta]=n
be=0.342
–20 to 20
Read firmware version number
*ver[sion]
*ver
ver.9999,9.99
ver.7103,2.00
Read structure of all commands
h[elp]
h
list of commands
Read all operating parameters
all
all
list of parameters
Legend:
[] Optional Command data
{} Returns either information
n Numeric data supplied by user
9 Numeric data returned to user
x Character data returned to user
Note:
When DUPLEX is set to FULL and a command is sent to READ, the command is returned followed by a car-
riage return and linefeed. Then the value is returned as indicated in the RETURNED column.
Controller Communications Commands continued