System configuration, Scanner unit, Display unit – Furuno 1932 MARK-2 User Manual
Page 6
iv
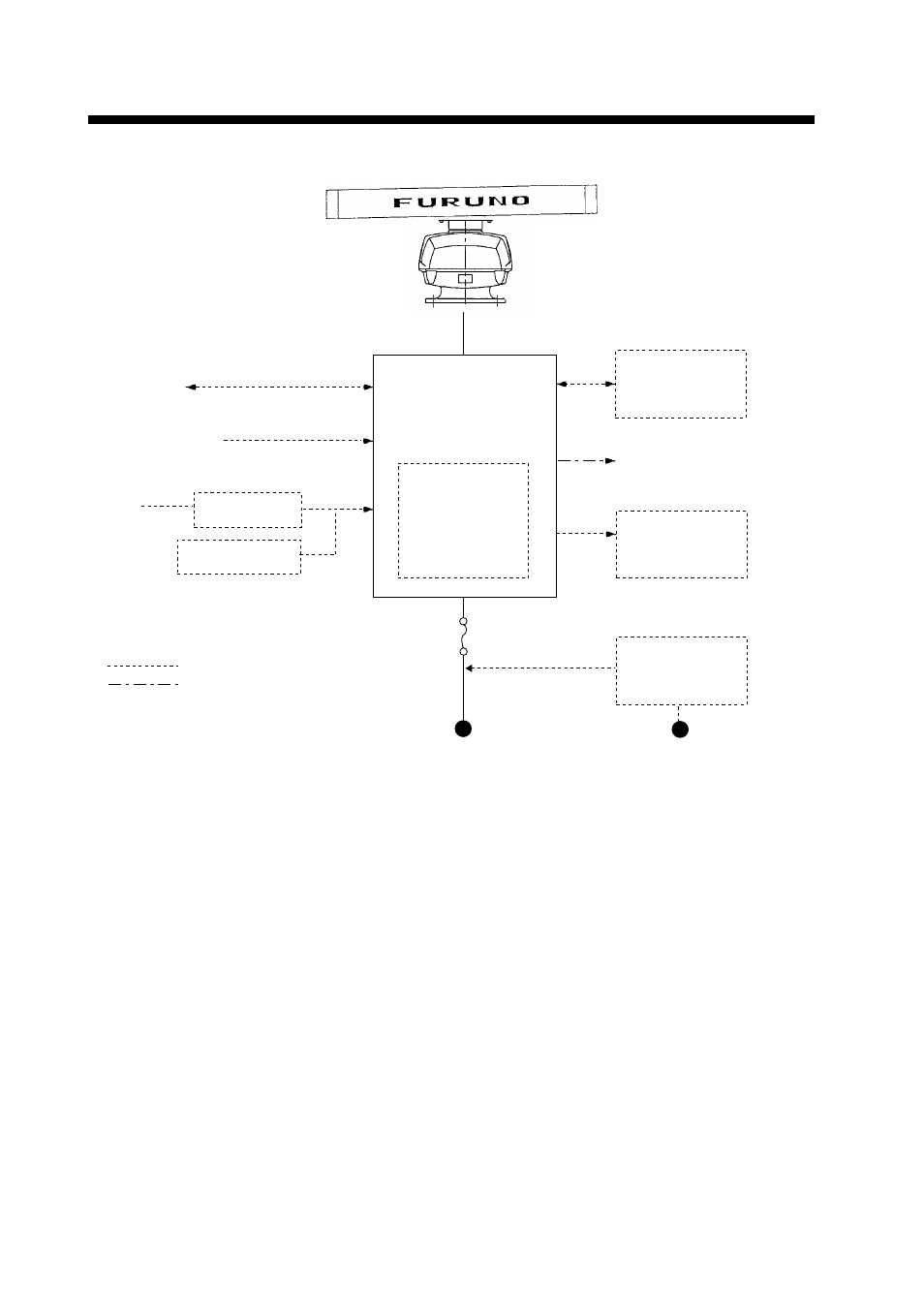
SYSTEM CONFIGURATION
RDP-118
Auto Plotter
ARP-10
(24 rpm only)
Navigation
device
IEC 61162* (In/Out)
IEC 61162* (In/Out)
Video Sounder
Gyro-
compass
Gyro Converter
AD-100
Integrated Heading
Sensor PG-1000
12/24/32 VDC
Rectifier
RU-3423
115/230 VAC
External Alarm
Buzzer OP03-21
Remote Display
FMD-811/1800
Radar Plotter
RP-110
Scanner Unit
MODEL 1932 MARK-2
XN10A-RSB-0070-064 (24 rpm)
XN10A-RSB-0073-064 (48 rpm)
Display Unit
12 VDC: 10A
24/32 VDC: 5A
MODEL 1942 MARK-2
XN12A-RSB-0070-059 (24 rpm)
XN12A-RSB-0073-059 (48 rpm)
*Equivalent to NMEA 0183
: Option
: Local Supply
Note: Even though the display unit meets waterproof standard IPX-5, the connection of ex-
ternal buzzer, radar plotter and/or remote display can affect waterproofness. Watertight integ-
rity cannot be guaranteed. When these modification has been done, the display unit should
not be mounted where exposed.
Input data
Own ship’s position: GGA>RMC>RMA>GLL (GLL is available Ver.1.5 only)
Speed: RMC>RMA>VTG>VHW
Heading (True): HDT>HDG
*1
>HDM
*1
>VHW>VHW
*1
Heading (Magnetic): HDM>HDG
*1
>HDT
*1
>VHW>VHW
*1
Course (True): RMC>RMA>VTG
Course (Magnetic): VTG>RMC>RMA
Waypoint (Range, Bearing): RMB>BWC>BWR
Loran time difference: RMA>GLC>GTD
Water depth: DPT>DBT>DBK>DBS
Water temperature: MTW>MDA
Time: ZDA
XTE: RMB>XTE>APB
Output data
NMEA0183 (Ver.1.5/2.0), RS-422
TLL(target data) and RSD
*1: calculate by magnetic drift.