Furuno AUTOPILOT NAVPILOT-500 User Manual
Page 15
2. BASIC OPERATION
2-5
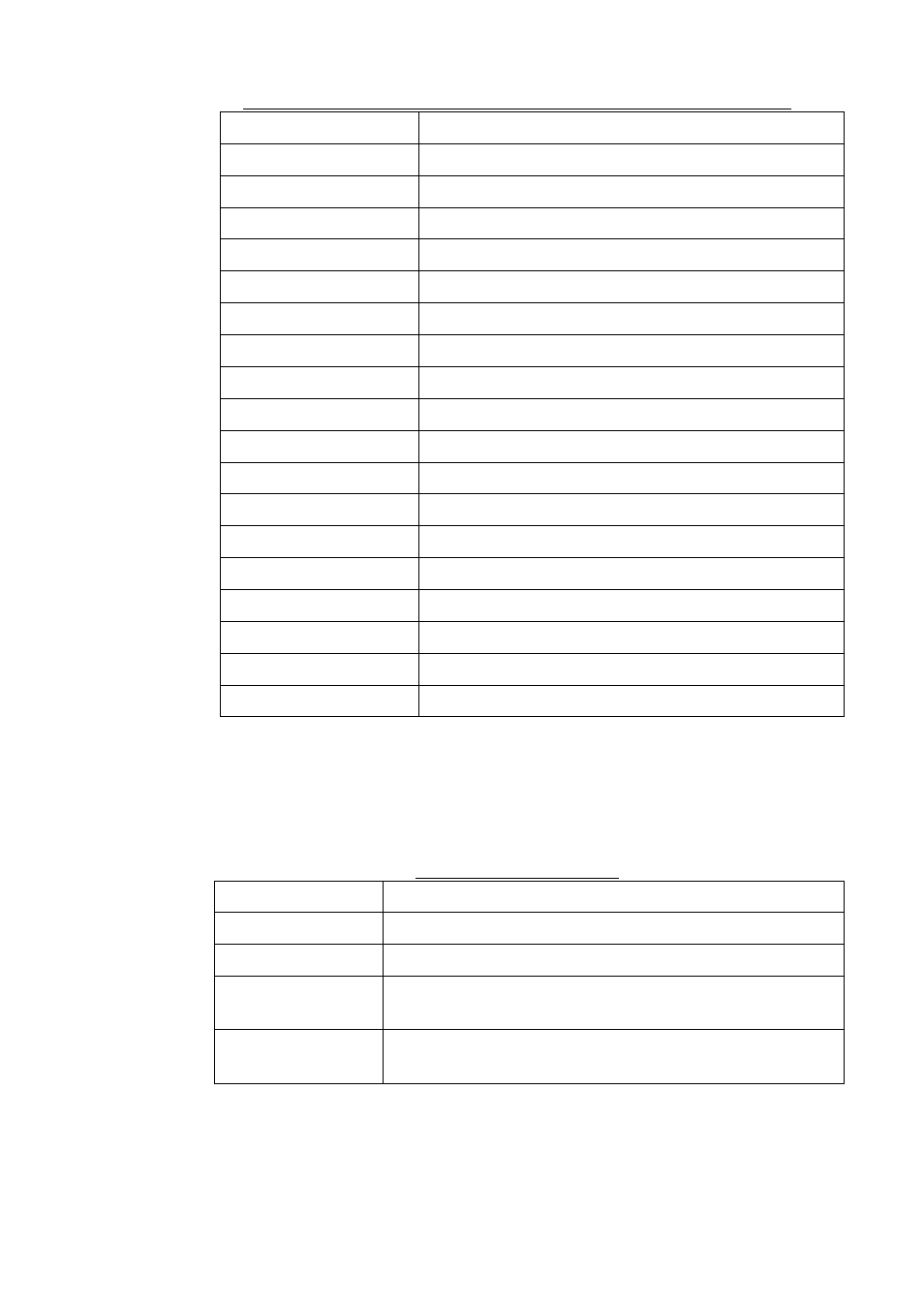
Data available for Normal display 2, Data display and Graphic display
Item Displayed
data
POS
Own ship’s position (L/L)
COG Course
over
ground
SOG Speed
over
ground
STW
Speed through water
TEMP Water
temperature
DPT Depth
BRG
Bearing to waypoint
RNG Range
to
waypoint
WPT Waypoint
position
(L/L)
XTE Cross-track
error
TTG Time-to-Go
to
Destination
ETA Estimated
Time
of
Arrival
DATE Date
TIME Time
WIND TRUE*
Wind direction and speed (True)
WIND RELATIV**
Wind direction and speed (Relative)
VOLT
Input/output power voltage to the processor unit
TRIP Trip
distance
*True:
The Speed and direction (relative to due north)
**Relative:
The direction (in relation to ship’s bow) and speed of the wind as it
appears to those on board, relative to the speed and direction of
the boat; combination of the true wind and the wind caused by the
boat’s movement.
Analog indicator selection
Item Displayed
data
RUDDER ANGLE
Rudder angle
DEVIATION Deviation
of
heading
RUDDER/XTE
Rudder angle will appear while in the STBY and AUTO
modes, XTE will appear while in the NAV mode.
DEVIATION/XTE
Deviation will appear in the STBY mode and AUTO modes,
XTE will be shown while in the NAV mode.