Innovate Motorsports OT-1 User Manual
Page 6
- 6 -
1.4 MTS
Advantages
With all the excitement about CAN bus communication, one may wonder why use a separate bus
like MTS at all. Truthfully, CAN will most likely become increasingly important in automotive data
acquisition over time. This is why newer Innovate products, like our LM-2 handheld lambda
metering system include support for multiple CAN buses. However, MTS still has some nice
advantages. For instance, it does not require a complicated gateway for connection to a
personal computer. More importantly, at least for data logging purposes, it is a ‘clocked and
synchronous’ data stream.
On a network like CAN, any device can broadcast at any time. There are special ‘collision
detection’ and ‘arbitration’ mechanisms that allow higher priority messages to supersede lower
priority messages. So, the communication rate from any given ‘node’ on the network varies over
time. In contrast, the communication rate from all devices in an MTS chain is even and fixed.
That is, each device is given equal communication priority at very evenly spaced intervals of time.
In operation, this difference can actually be seen on the OT-1 indicator lights. The MTS light,
which blinks in proportion to the MTS packets flowing, blinks very evenly. When connected to a
CAN network, the Vehicle indicator light, which blinks in proportion to complete data sets
acquired, is usually fast but blinks unevenly.
This fixed and common timebase allows MTS compatible acquisition devices to provide very
good data over MTS’s modest bandwidth connection. It also helps to better alight channels, time
wise, from different devices in recorded logs. With asynchronous communication, data is often
time stamped by the logging system based upon when it is received. In a synchronous
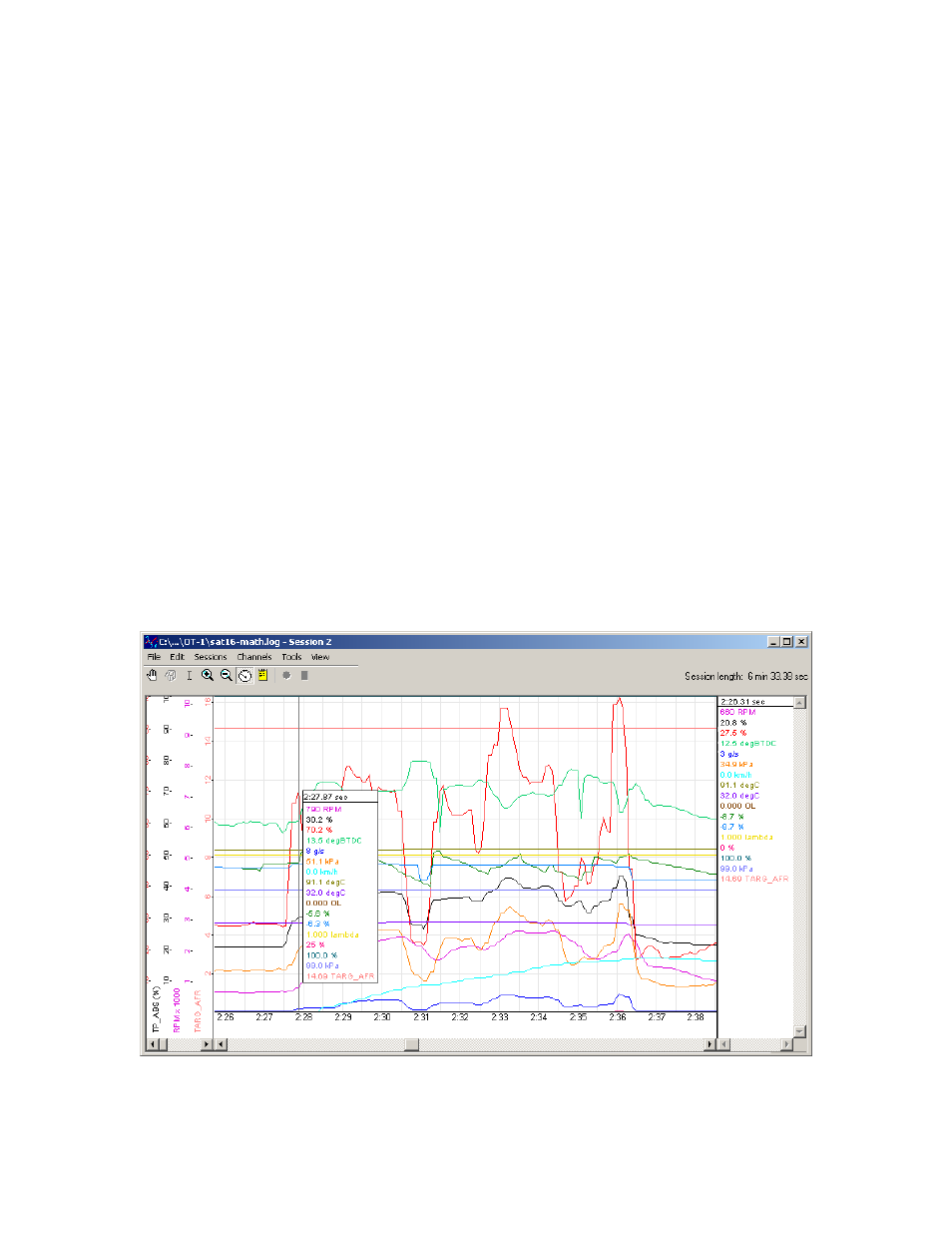
communication system, data is inherently time stamped based upon when it was sent. So, when
you, say, place a measurement point in a recorded log you can have good confidence that the
values presented do, in fact, represent the same point in time:
Interestingly, there is an high level protocol for CAN called “TTCAN” (“Time Triggered CAN”) that
is intended for similar applications. However, it is not incorporated into ISO 15765, the current
standard for communicating automotive diagnostic information via CAN.