External data list – Icom MR-1000TTM User Manual
Page 43
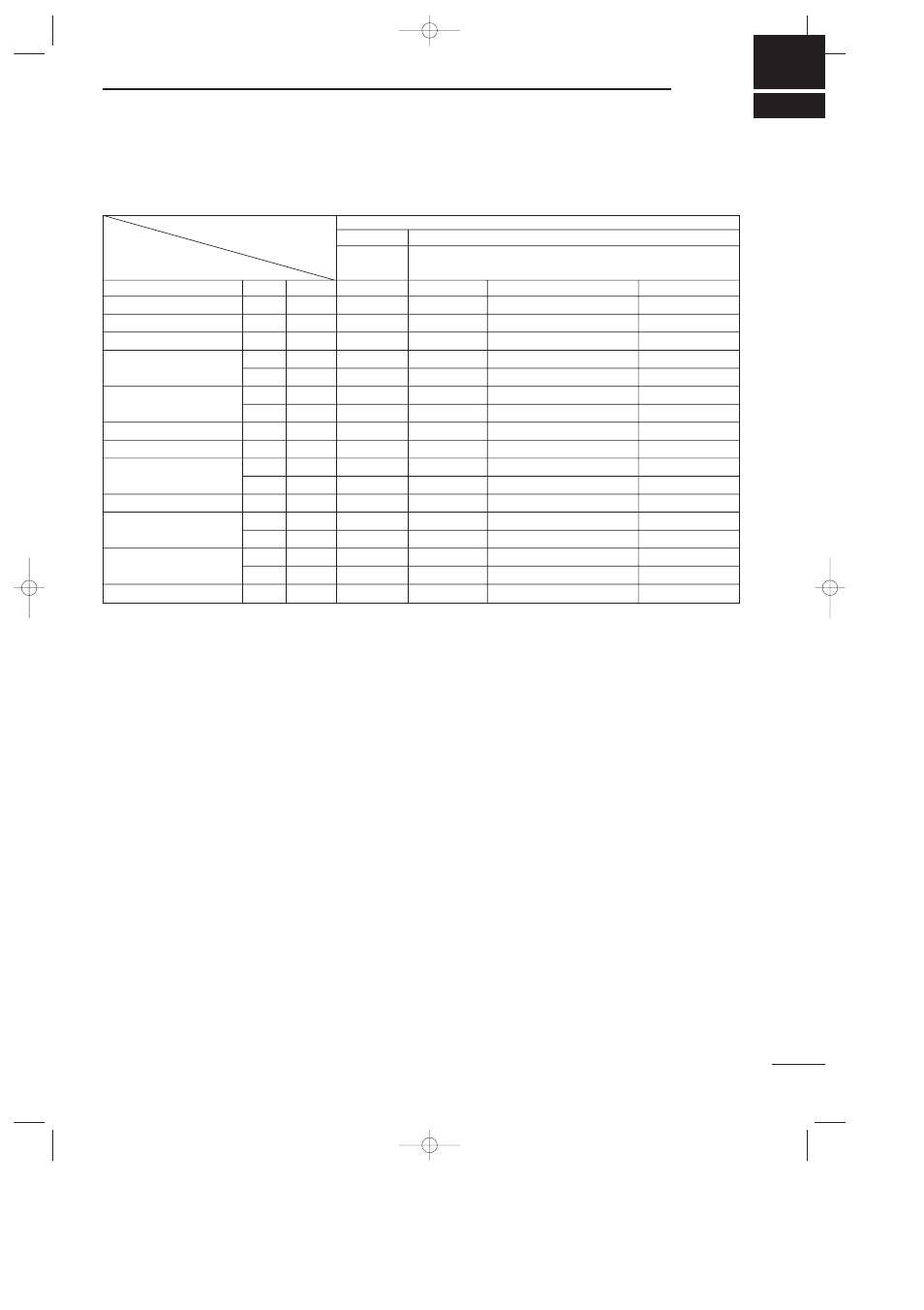
The following external bearing, speed, position and way point data is (are) required , when you use the radar func-
tions.
*
1
OG; Over ground, TW; Through the water
*
2
NMEA1 and NMEA2 connectors; See p. 24
• “HDT”, “HDM”, “RMC”, “GGA”, “GLL”, “VTG”, “WPL”, “GNS” and “BWC” are SENTENCES of the NMEA0183.
• If BRG INPUT is set to “GPS”, “RMC” of NMEA2 connector or COG (Course Over the Ground) of “VTG” a bow it
receives as a direction, even if there is no direction information (compass etc.) in NMEA1 connector, the screen
display of the North rise etc. is possible.
However, direction accuracy falls when the speed of a ship is set to 2 or less kts, or when exceeding 3 kts a bow
it does not receive as direction data. Moreo, the influence of measurement position accuracy or a current an actual
bow it may differ from a direction.
15
39
EXTERNAL DATA LIST
EXTERNAL DATA INPUT
NMEA1*
2
NMEA2*
2
“HDT”, “HDM”
“RMC”, “GGA”, “GLL”, “VTG”, “WPL”, “BWC”, LOG, “GNS”
N+1, AUX
FUNCTION
DISPLAY
BEARING
SPEED
POSITION
WAY POINT
HEAD UP
HU
COURSE UP
CU
Required
NORTH UP
NU
Required
TRUE MOTION
OG*
1
TM
Required
“RMC”, “GGA” or “GLL”, “GNS”
TW*
1
TM
Required
LOG
SPEED DISPLAY
OG*
1
SOG
“RMC” or “VTG”
TW*
1
STW
LOG
HEADING BEARING
HDG
Required
WAY POINT
WPT
Required
“RMC”, “GGA” or “GLL”, “GNS”
“WPL” or “BWC”
OWN VECTOR
OG*
1
Required
“RMC” or “VTG”
TW*
1
Required
LOG
MOB
MOB
Required
“RMC”, “GGA” or “GLL, “GNS”
ATA
OG*
1
ATA
Required
“RMC” or “VTG”
TW*
1
ATA
Required
LOG
VRM/PI/WPT/MOB estimated
OG*
1
“RMC” or “VTG”
time of arrival
TW*
1
LOG
MAGNETIC VARIATION (AUTO)
“RMC” or “VTG”
MR-1000R2_T2.qxd 04.2.24 13:51 Page 39