2 spindle orientation – Yaskawa A1000 AC Drive Spindle Orientation User Manual
Page 12
2 Spindle Orientation
12
YASKAWA TM.A1000SW.063 Spindle Orientation A1000 Custom Software Supplement
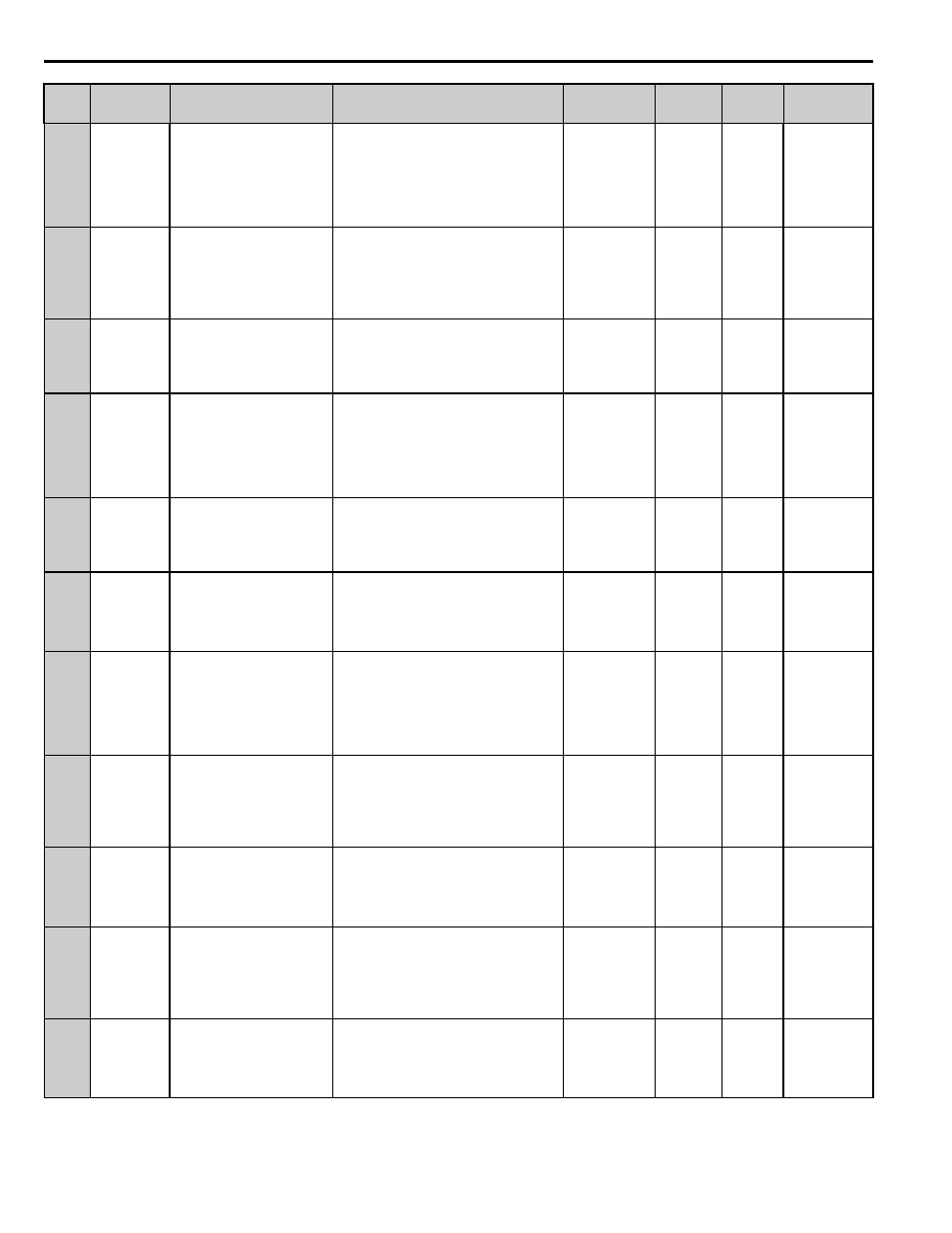
P1-10
0609h
Orientation Encoder Card Selection
ORT Enc Select
This parameter selects which PG option card is used
for orientation.
0: CN5-C
1: CN5-B
Note: When using only one PG option card, P1-10
must be set to 0.
0 to 1
0
No
– – – Y– – N
P1-11
061Eh
Orientation Deceleration Selection
ORT Dec Sel
This parameter selects whether the drive’s C1-0
Deceleration Time is overridden by the P1-12
Orientation Deceleration Time once the drive
reaches the P1-01 Orient Speed.
0: Disabled
1: Enabled
0 to 1
0
No
– – – Y– – N
P1-12
061Fh
Orientation Deceleration Time
ORT Dec Time
The Orientation Deceleration Time parameter sets
the time to decelerate from the maximum output
frequency (E1-04) to 0 Hz.
0.00 to 600.00 sec
10.00
Yes
– – – Y– – N
P1-13
0620h
Spindle Proximity Sensor
Orientation Enable
Prox Sens Enable
This parameter selects whether or not the drive is
configured with a proximity sensor as described in
Configuration 3. Setting parameter P1-13 = 1 causes
the drive to recognize the values set in proximity
sensor parameters P1-14 and P1-15.
0: Disabled
1: Enabled
0 to 1
0
No
– – – Y– – N
P1-14
0621h
Proximity Sensor Pulse Width
Prox Pulse Width
This parameter defines the pulse width of the
proximity sensor at the P1-02 Creep Speed,
measured in elapsed encoder counts.
0 to 60000 Cnts
0
No
– – – Y– – N
P1-15
0622h
Proximity Sensor Pulse State
Prox Pulse State
This parameter defines whether or not the proximity
sensor is a Normally Open (rising edge) or
Normally Closed (falling edge).
0: Normally Open
1: Normally Closed
0 to 1
0
No
– – – Y– – N
P2-01
060Ah
Marker Offset Selection
MarkerOffset Sel
This parameter determines how the orientation
position offset from the marker pulse is determined.
0: Digital Input
1: Sequential
2: Memobus COM
Refer to Orient Position Offset Selection on
page 25
0 to 2
0
No
– – – Y– – N
P2-02
060Bh
Marker Offset 1
Marker Offset 1
This parameter, along with parameters P2-03, P2-
04, and P2-05, sets the orientation (or stopped)
position of the machine. P2-01 governs when P2-02
is active.
Refer to Orient Position Offset Selection
.
Note: Counts = Encoder PPR x 4.
0 to 65535 Cnts
0
No
– – – Y– – N
P2-03
060Ch
Marker Offset 2
Marker Offset 2
This parameter is used in conjunction with
parameters P2-02, P2-04, and P2-05 to determine
the orientation position offset from the marker
pulse.
Refer to Orient Position Offset Selection on
Note: Counts = Encoder PPR x 4.
0 to 65535 Cnts
0
No
– – – Y– – N
P2-04
060Dh
Marker Offset 3
Marker Offset 3
This parameter is used in conjunction with
parameters P2-02, P2-03, and P2-05 to determine
the orientation position offset from the marker
pulse.
Refer to Orient Position Offset Selection on
Note: Counts = Encoder PPR x 4.
0 to 65535 Cnts
0
No
– – – Y– – N
P2-05
060Eh
Marker Offset 4
Marker Offset 4
This parameter is used in conjunction with
parameters P2-02, P2-03, and P2-04 to determine
the orientation position offset from the marker
pulse.
Refer to Orient Position Offset Selection on
Note: Counts = Encoder PPR x 4.
0 to 65535 Cnts
0
No
– – – Y– – N
No.
MEMOBUS/
Modbus
Address
Name
Digital Operator Display
Description
Range
Default
Value
Change
During
Run
Control Method/
Access Level