2 spindle orientation, Table 4 additional parameters – Yaskawa A1000 AC Drive Spindle Orientation User Manual
Page 11
2 Spindle Orientation
YASKAWA TM.A1000SW.063 Spindle Orientation A1000 Custom Software Supplement
11
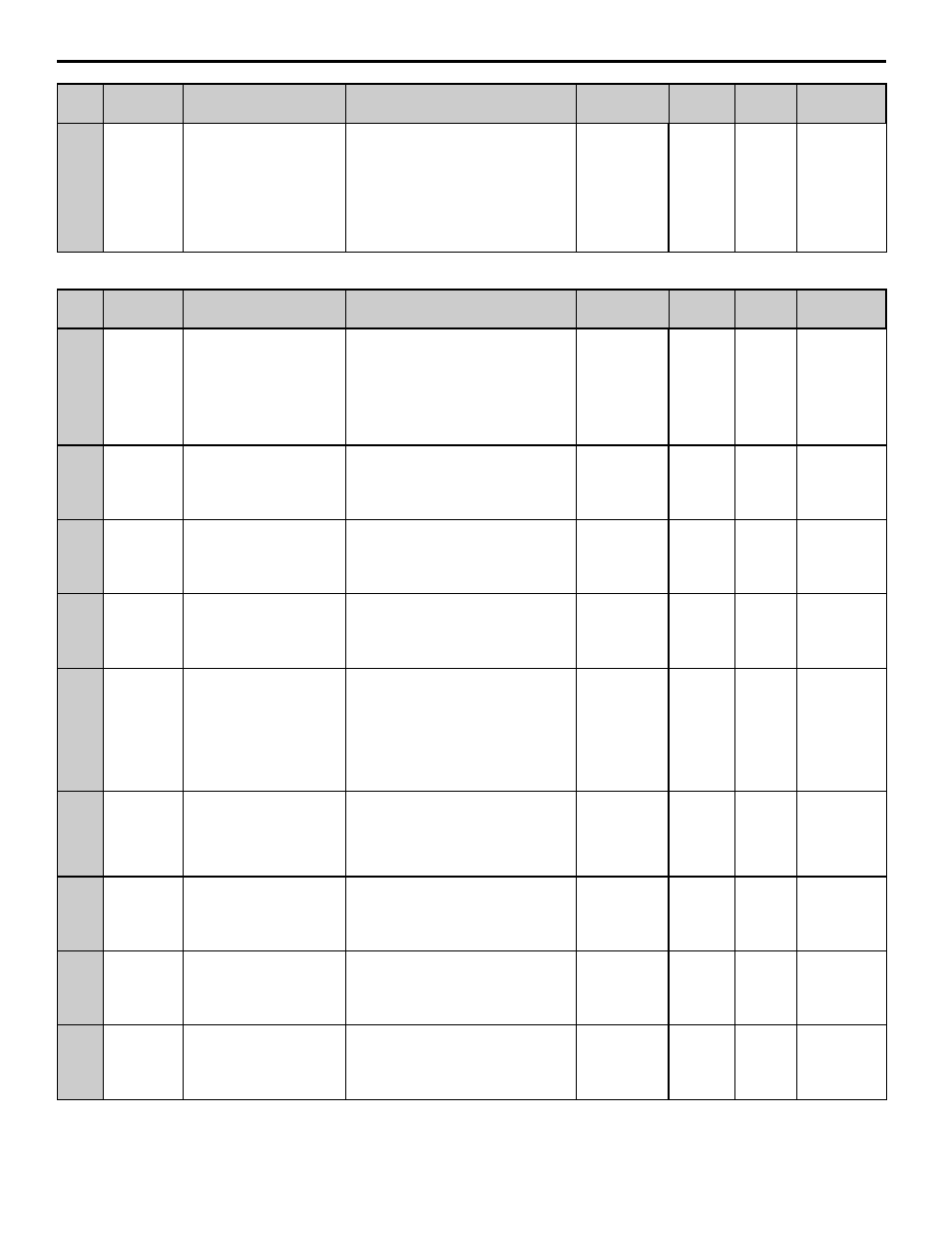
Table 4 Additional Parameters
S2-18
6A0h
Motor 2 High Frequency Slip
Compensation During
Regeneration Selection
HF SlipCompRgn 2
When Slip Compensation during Regeneration at
Hi-Speed is activated and a regenerative load is
applied, it might be necessary to use a dynamic
braking option (braking resistor, braking resistor
unit, or braking unit).
0: Disabled
1: Enabled (6 Hz and Above)
2: Enabled
(Compensation provided wherever possible)
0 to 2
0
No
– – – Y– – N
No.
MEMOBUS/
Modbus
Address
Name
Digital Operator Display
Description
Range
Default
Value
Change
During
Run
Control Method/
Access Level
P1-01
0600h
Orient Speed
Orient Speed
This parameter sets the frequency at which the
drive switches to the Orient Deceleration Time
(P1-12) and Orient ASR settings (P2-10 and P2-
11) when these parameters are enabled.
Note: P1-01 must be set such that it is not greater
than the control modes switchover frequency:
((S2-01 – S2-02) > P1-01). P1-01 must also be set
lower than the Maximum Output Frequency E1-04.
0.00 to 200.00 Hz
20.00
No
– – – Y– – N
P1-02
0601h
Creep Speed
Creep Speed
This parameter sets the speed at which the drive
locates the marker pulse. This is also the speed at
which s-curves are disabled.
0.10 to 10.00 Hz
2.00
No
– – – Y– – N
P1-03
0602h
Creep Distance
Creep Distance
This parameter sets the number of quadrature
encoder counts around the orientation position
where the frequency reference is allowed to drop
below the P1-02 Creep Speed. Within the Creep
Distance, the drive accel/decel times are set to 0.
0 to 2000 Cnts
200
No
– – – Y– – N
P1-04
0603h
Approach Speed
Approach Speed
This parameter sets the minimum speed that the
drive operates at until it reaches the P1-05 ORT Set
Window.
0.00 to 1.00 Hz
0.10
No
– – – Y– – N
P1-05
0604h
Orientation Complete Detection Set
Window
ORT Set Window
This parameter sets the initial window around the
orientation position that activates the Orient
Complete digital output. The Orient Complete
digital output (H2-
= 40) closes when the
encoder quadrature count is within the P1-05
window of the orientation offset and after the P1-07
delay time has expired.
Note: Counts = Encoder PPR x 4.
0 to 100 Cnts
25
No
– – – Y– – N
P1-06
0605h
Orientation Complete Detection
Reset Window
ORT Rst Window
This parameterr sets, in quadrature encoder counts,
the window around the orient position that keeps the
Orient Complete digital output (H2-
= 40)
closed.
Note: Counts = Encoder PPR x 4.
0 to 100 Cnts
0
No
– – – Y– – N
P1-07
0606h
Orientation Set Time
ORT Set Time
This parameter sets the delay time from when the
P1-05 Orient Set window is satisfied and the
Orientation Complete digital output (H2-
= 40)
closes.
0 to 1000 ms
10
No
– – – Y– – N
P1-08
0607h
Positioning Proportional Gain
Pos P Gain
This parameter sets the proportional gain used for
the position controller.
0.10 to 20.00
1.00
No
– – – Y– – N
P1-09
0608h
Orientation Compensation Distance
Orient Comp Dist
This parameter sets the minimum orientation
distance between the orientation encoder marker
pulse at or below P1-02 and the desired orientation
offset. This distance is expressed as a percentage of
the active encoder PPR (e.g. F1-01 x P1-09).
0 to 100%
50%
No
– – – Y– – N
No.
MEMOBUS/
Modbus
Address
Name
Digital Operator Display
Description
Range
Default
Value
Change
During
Run
Control Method/
Access Level