Using the microsensor in standalone mode – Eagle Tree Airspeed V3 Standalone MicroSensor User Manual
Page 2
Copyright © 2008 Eagle Tree Systems, LLC
http://www.eagletreesystems.com
Page 2
somewhat for higher angles of attack.
2.
The static holes on the pitot tube (shown on Figure 1) should extend at least 1/2” (13mm) past the wing’s leading edge, or past any other
obstructions - the farther out, the better. This is to ensure that the static holes and pitot pickup are in undisturbed air.
3.
For prop planes, it’s important that the tube be placed so that it is not directly in the plane’s prop-wash, which will result in erroneous
readings. The best place to install the tube is on the leading edge of the wing several inches out from the fuselage, as shown in Figure 1.
4.
For jets, gliders, or “pusher” prop planes, the nose cone often provides a perfect mounting location.
After Pitot Tube installation, it is recommended that you glue or otherwise attach the silicon hose to the airframe, to reduce the chance that
hose vibration or movement could cause erroneous readings.
The MicroSensor circuit board can be mounted anywhere in the model. If you wish to read the LED without removing the wing, a small
rectangular hole can be cut at the mounting location of the circuit board, and the board mounted with tape or Velcro, so that the LED is
visible at all times.
Using the MicroSensor in Standalone Mode
Powering the MicroSensor in Standalone Mode
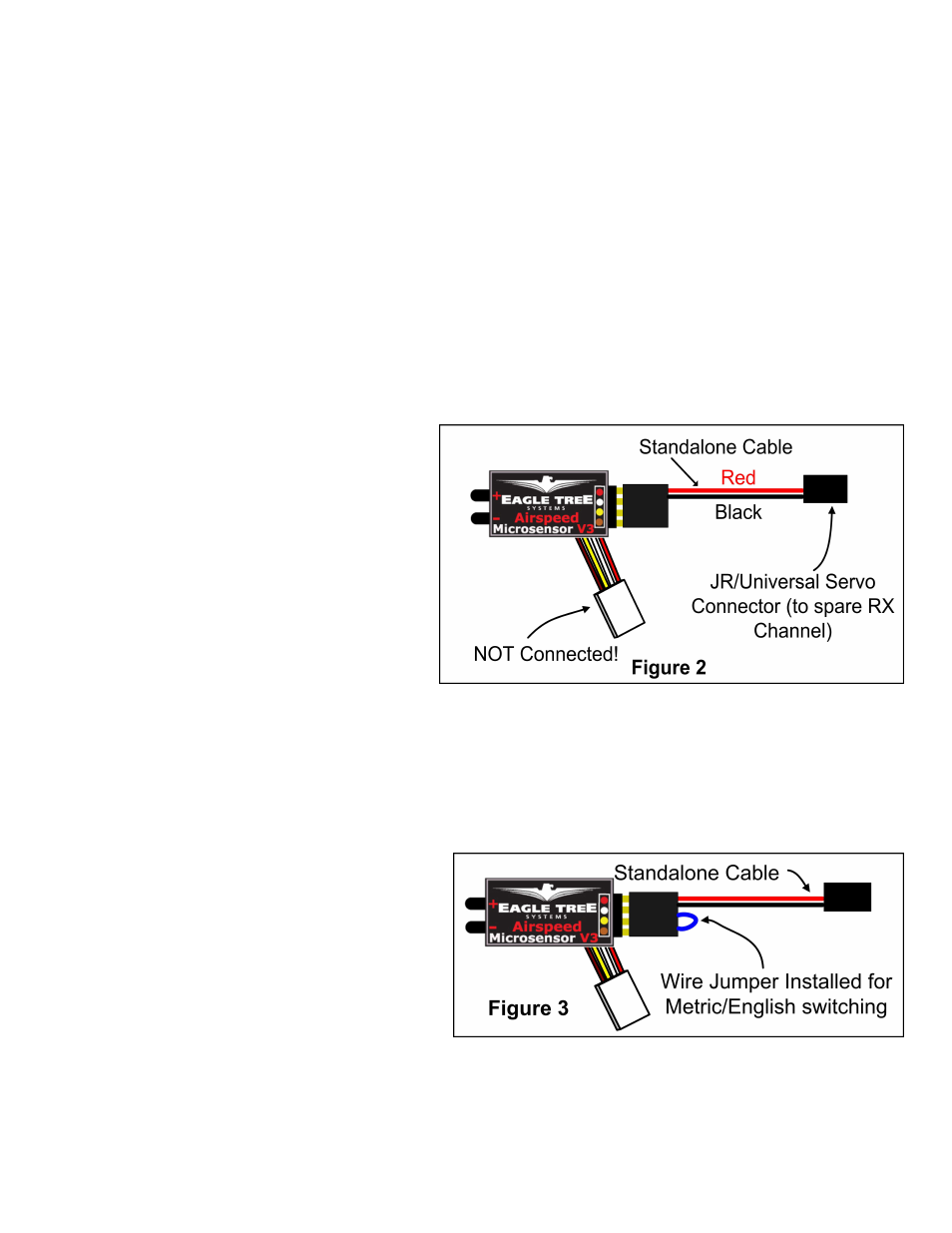
For standalone mode (not connected to an eLogger), connect
the Standalone Cable to the gold pins of the MicroSensor, as
shown in Figure 2. Note that the RED wire of the standalone
cable corresponds with the red dot on the label. The polarity
of the connection is as follows:
RED = Positive (Vdd)
BLACK = Negative (ground)
The JR/Universal servo end of the Standalone Cable connects
to a spare Receiver channel or small battery. Note that the
voltage must be between 3V and 16V. Do not exceed 16V!
IMPORTANT: Ensure that you connect the Standalone
Cable with the correct polarity, or the MicroSensor could
be damaged, voiding the warranty!
Note that in Standalone Mode, the 4 wire cable built into the MicroSensor must NOT be connected to anything!
Configuring Metric vs English Units in Standalone Mode
When powered on, the LED readout will briefly display “0” if the unit is configured for English (MPH), or will display a “1” if configured
for metric (KPH). The factory default configuration is MPH.
To switch between English and metric units, connect the
Standalone Cable as described above, but don’t power the
MicroSensor. Then, connect a small piece of wire between the
unconnected pins of the Standalone Cable’s 4 pin connector,
corresponding to the brown and yellow dots on the label, as
shown in Figure 3. This creates a jumper between the brown
and yellow labeled pins.
Then, power the MicroSensor via the Standalone Cable. A “0”
will then flash a few times to indicate that English units are
configured, or a “1” will flash if Metric units are configured. If
the wrong units are configured, just disconnect the power from the MicroSensor and reconnect it.
Once the desired units are configured, disconnect from power and remove the wire jumper. Then, when reconnected to power, the desired
units should be displayed briefly (“0” or “1”).
Reading Airspeed in Standalone Mode