TruTrak Sorcerer RV10 AP100 User Manual
Page 15
Sorcerer, RV 10, AP 100 Autopilot Installation Manual
13
TruTrak Flight Systems
May
2009
8300-010
Rev B
Electrical Pin-out
All TruTrak DFC and Sorcerer autopilots have consistent wiring requirements. The Sorcerer and Sorcerer with Yaw Damper
will be covered in this manual.
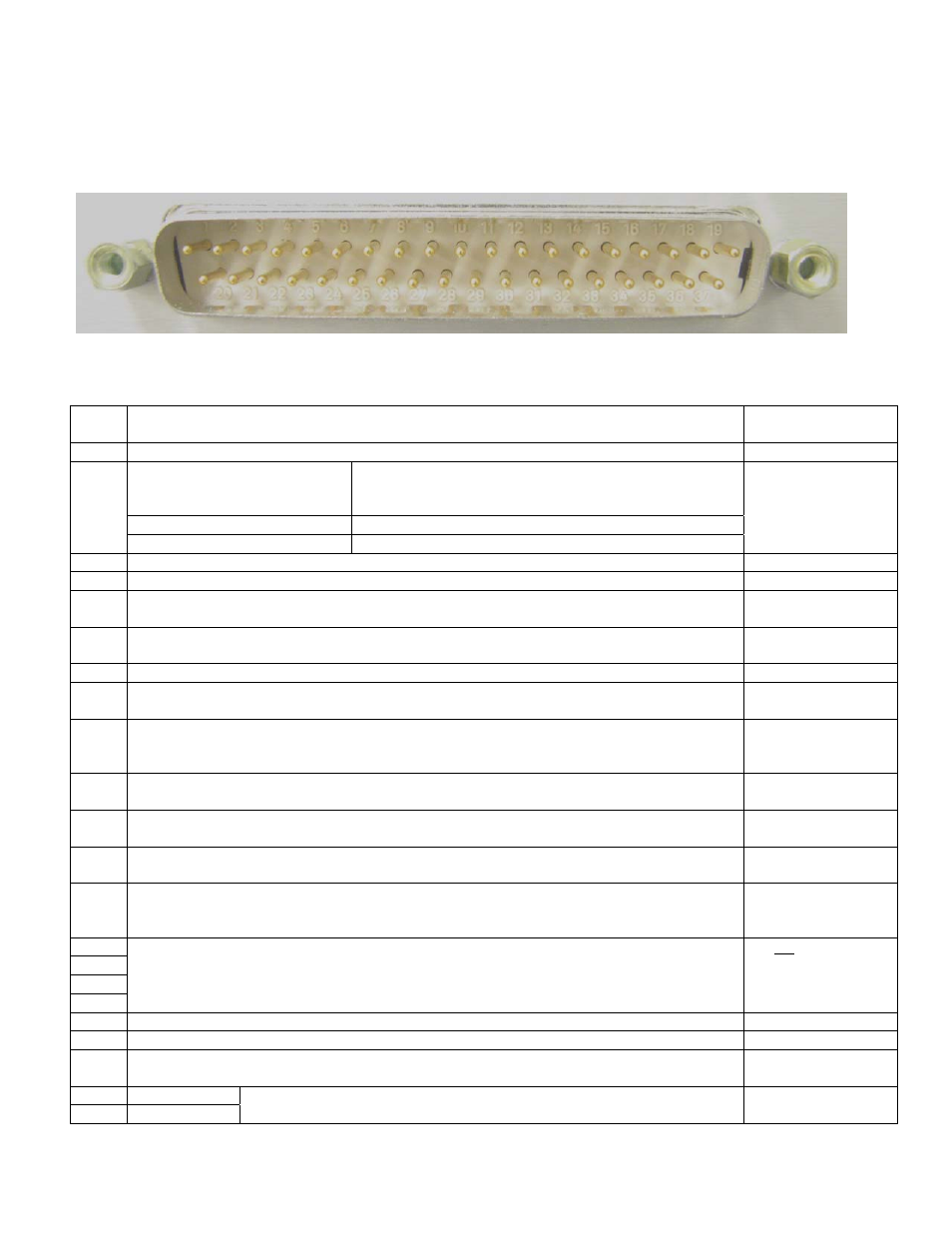
The table below provides a brief explanation of each pin function on the main 37-pin connector P101.
P101 Autopilot Rear Connector (Viewed from rear of autopilot) or wire side of connector.
P101
Pin
Function
Notes
1 Dedicated ground connection for Pitch Reverse Jumper.
Pitch Reverse Jumper,
present or absent, as follows:
Direction of servo arm / capstan rotation
(as viewed from face of the servo body)
for UP elevator
Pin 2 open (no connect):
Servo CCW (counter-clockwise) Î UP
2
Pin 2 Jumper to pin 1:
Servo CW (clockwise) Î UP
See note 4 on wiring
diagram
3 Auxiliary RS-232 Output. Presently unused, intended for future expansion.
4 No Connection. Reserved for future expansion.
5 Yaw Damper Activity. A signal from the autopilot which sets the amount of response the yaw
damper exhibits to azimuth disturbances and “ball” deflection.
Sorcerer with Yaw
Damper only
6 Yaw Damper Leveling. A signal from the autopilot which is used for fine adjustment of the
“ball” in a yaw damper.
Sorcerer with Yaw
Damper only
7 No Connection. Reserved for future expansion.
8 Yaw Damper Activate. A signal from the autopilot which turns on the yaw damper function.
Sorcerer with Yaw
Damper only
9 Analog DG/HSI Input. A zero to 5V DC signal centered at 2.5 volts from an external steering
device. An adapter specific to a given DG or HSI is required. Use 1 meg ohm resistor to reduce
voltage. Consult factory for details on this adapter.
Install 1 meg ohm
resistor in series for
Garmin 600 / 900
10 Pitch Servo Torque Control. A signal from the autopilot to the pitch servo which sets the
amount of torque to be delivered by the servo.
11 Pitch Servo Trim Sensor. A signal from the pitch servo to the autopilot which indicates an
out-of-trim condition and its direction.
12 Autopilot Master (+12 to +28 V DC). The autopilot itself draws less than ½ ampere. Most of
the current required by the autopilot system is used by the servos (up to 1A per servo).
13 Audio alerter signal. This pin may be wired to an unswitched input of an audio panel. The
autopilot uses various voice or tones to denote specific events (loss of GPSS, capture
Glideslope, etc). Volume is adjustable within a setup screen of the autopilot.
14
15
16
17
Pitch Servo control lines. These lines cause the stepping motor in the pitch servo to run in the
appropriate direction at the desired velocity. They are small-signal lines and do not have any
substantial current-carrying capability or require any special shielding. Connect to pitch servo
as shown on wiring diagram.
Do not attempt to
reverse servo
direction by
swapping wires
18 No Connection. Reserved for future expansion.
19 Ground Connection. Provide #20 AWG to common grounding point.
20 Control Wheel Switch. Connect as shown in wiring diagram to a SPST momentary switch
located remotely to the autopilot for convenient engage/disengage function.
21 CDI LEFT
22 CDI RIGHT
Analog +/- 150 mV differential signals from Nav receiver. Pin 22 more
positive than pin 21 indicates CDI needle right-of-center.
Not used in RV 10
AP