Hudson Robotics SOLO User Manual
Page 39
39
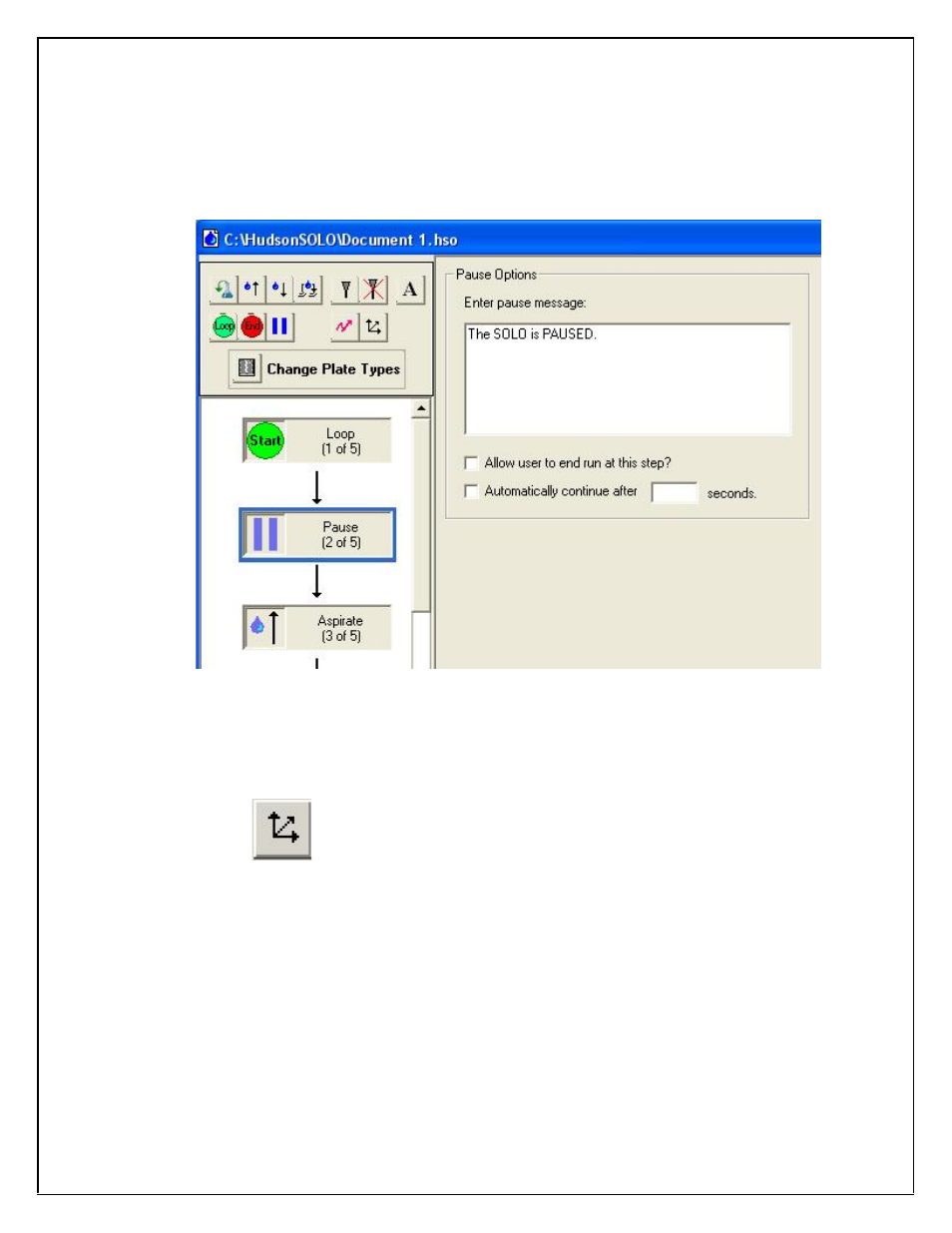
a message to the operator. It also allows the user to permit the operator to end the
method at the time of the pause (if, for instance, no liquid was aspirated).
The user types the desired message into the “Enter pause message” box, and
allows the operator to end the method by checking the “Allow user to end run at
this step?” box.
The user may also simply set a timer (in seconds) to pause the method here, then
automatically resume after the time has elapsed.
3.8 – Move Arm Step
This step, shown in the next figure, allows the user to simply move the robot
arm to any taught position at a speed given as a percentage of the arm’s full
speed in the “XYZ Speed” box. The ‘X’ and ‘Y’ axes move first, followed by
the ‘Z’ axis.