Basisidentifier der can-objekte, Inbetriebnahme – Lenze E82ZAFCC210 User Manual
Page 33
Inbetriebnahme
Basisidentifier der CAN-Objekte
7
EDK82ZAFCC-210 DE/EN/FR 4.0
33
H2_BasisidentifierCanObjekte-Basisidentifier
Basisidentifier der CAN-Objekte
Das CAN-Bussystem ist nachrichtenorientiert und nicht teilnehmerorientiert. Jede Nach-
richt hat eine eindeutige Kennung, den Identifier. Bei CANopen wird eine Teilnehmerorien-
tierung dadurch erreicht, dass es für jede Nachricht nur einen Sender gibt.
Mit Ausnahme des Netzwerkmanagements und des Sync-Telegramms enthält der Identi-
fier die Knotenadresse des Antriebs:
Identifier (COB-ID) = Basis-Identifier + einstellbare Knotenadresse (Node-ID)
Die Identifier-Vergabe ist im CANopen-Protokoll festgelegt.
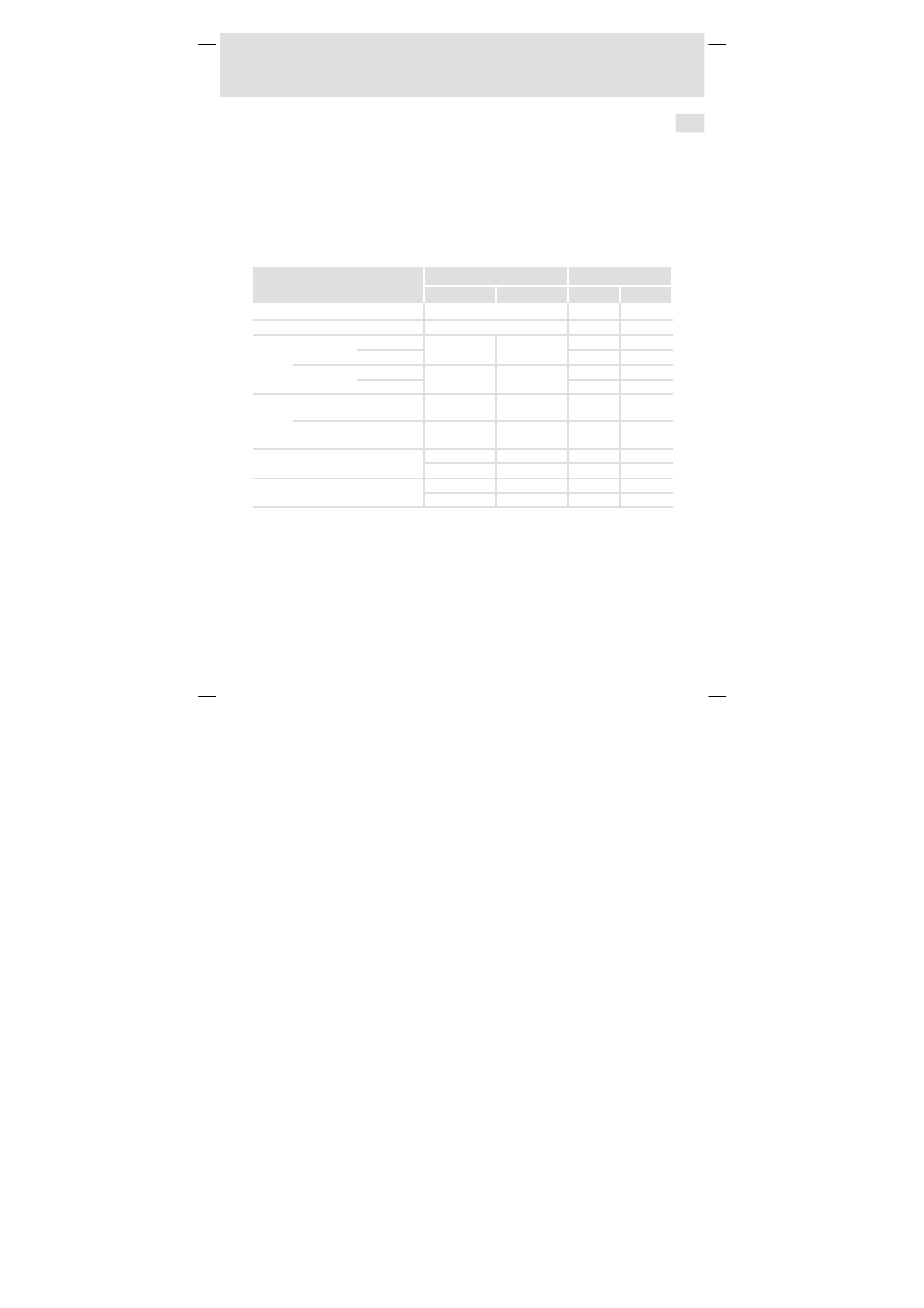
Der Basisidentifier ist entsprechend der CANopen-Spezifikation ab Werk mit folgenden
Werten voreingestellt:
Objekt
Richtung
Basisidentifier
vom Antrieb
zum Antrieb
dec
hex
NMT
0
0
Sync
128
80
PDO1
TPDO 1
(CAN-OUT1)
Sync-gesteuert
X
384
180
zeitgesteuert
769
301
RPDO1
(CAN-IN1)
Sync-gesteuert
X
512
200
zeitgesteuert
768
300
PDO2
TPDO2
(CAN-OUT2)
zeitgesteuert
X
641
281
RPDO2
(CAN-IN2)
zeitgesteuert
X
640
280
SDO1
X
1408
580
X
1536
600
SDO2
X
1472
5C0
X
1600
640
PDO Sync-gesteuert oder zeitgesteuert über C0360 konfigurieren