VEGA VEGASON 62 Foundation Fieldbus User Manual
Page 45
45
10 Supplement
VEGASON 62 • Foundation Fieldbus
28791-EN-130417
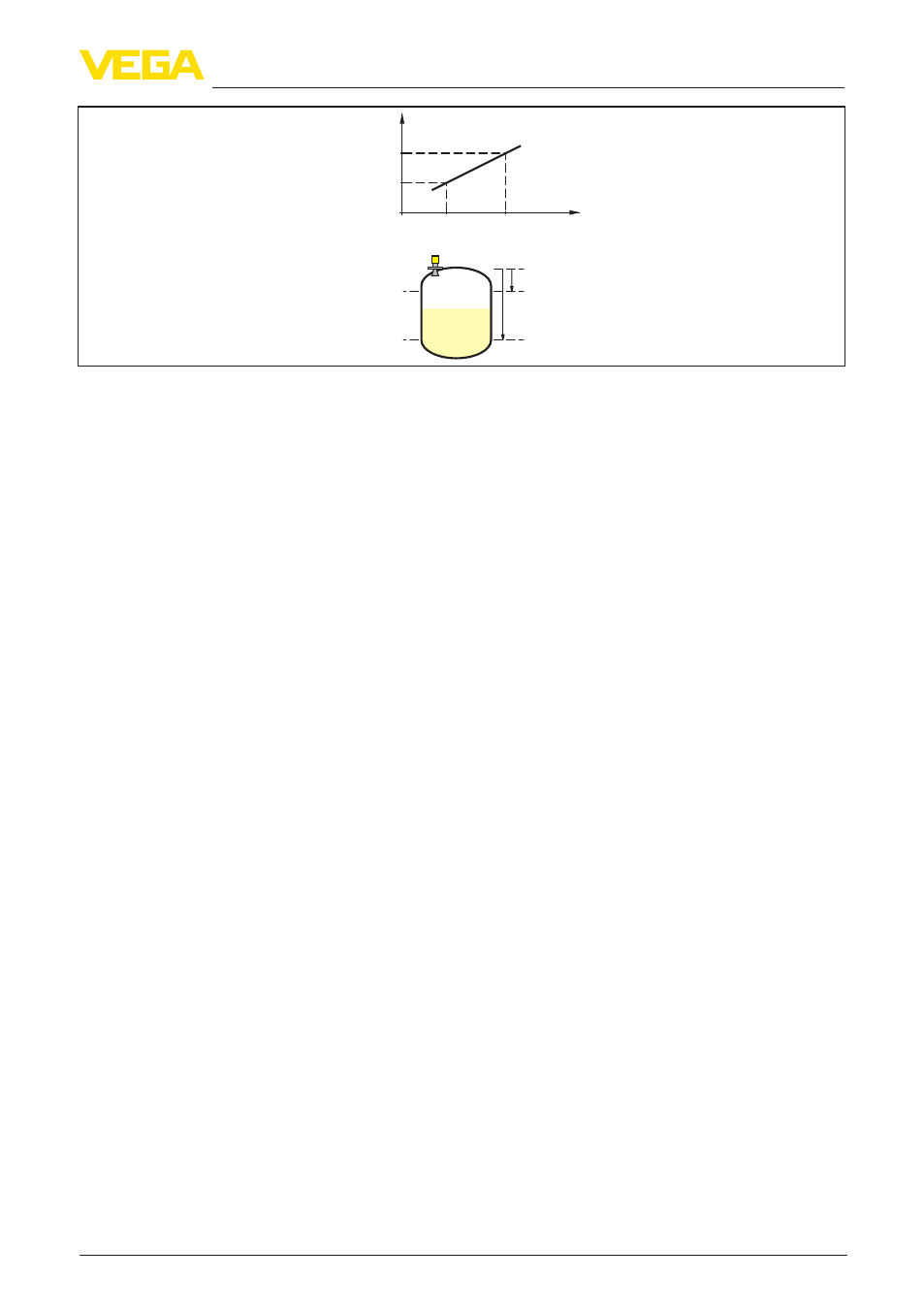
Secondary_value_1
Calibration
Lowest Point
Calibration
Highest Point
Sensor_value
cal_level_lo
cal_level_hi
Calibration
Lowest Point
Calibration
Highest Point
Sensor reference plane
cal_level_lo [%]
cal_level_hi [%]
Fig. 30: Adjustment VEGASON 62
Parameter list for Device revision 3.0
The following list contains the most important parameters and their meaning:
•
primary_value
– This is the process value after adjustment and Linearization with the status of the transducer
block
•
primary_value_unit
– Unit code of 'Primary_value'
•
secondary_value_1
– Value after min./max.-adjustment (level + level offset). Selected as input to AIFB by setting
'Channel' = 2. Unit derives from 'Secondary_value_1_unit'
•
secondary_value_1_unit
– Unit code of 'Secondary_value_1'
•
secondary_value_2
– Sensor value + sensor offset. Selected as input to AIFB by setting 'Channel' = 3. Unit derives
from 'Secondary_value_2_unit'
•
secondary_value_2_unit
– Unit code of 'Secondary_value_2'
•
sensor_value
– Raw sensor value, i.e. the uncalibrated measurement value from the sensor. Unit derives from
'Sensor_range.unit'
•
sensor_range
– Sensor_range.unit' refers to 'Sensor_value', 'Max/Min_peak_sensor_value', 'Cal_point_hi/lo'
•
simulate_primary_value
•
simulate_secondary_value_1
•
simulate_secondary_value_2
•
Device Status
•
Linearization Type
– Possible types of linearization are: linear, user defined, cylindrical lying container, spherical
container
•
CURVE_POINTS_1_10
– X and Y values for the user defined linearization curve
•
CURVE_POINTS_11_20
– X and Y values for the user defined linearization curve
•
CURVE_POINTS_21_30
– X and Y values for the user defined linearization curve
•
CURVE_POINTS_31_33
– X and Y values for the user defined linearization curve