Toshiba S2E21 User Manual
Page 69
T O S H I B A
and
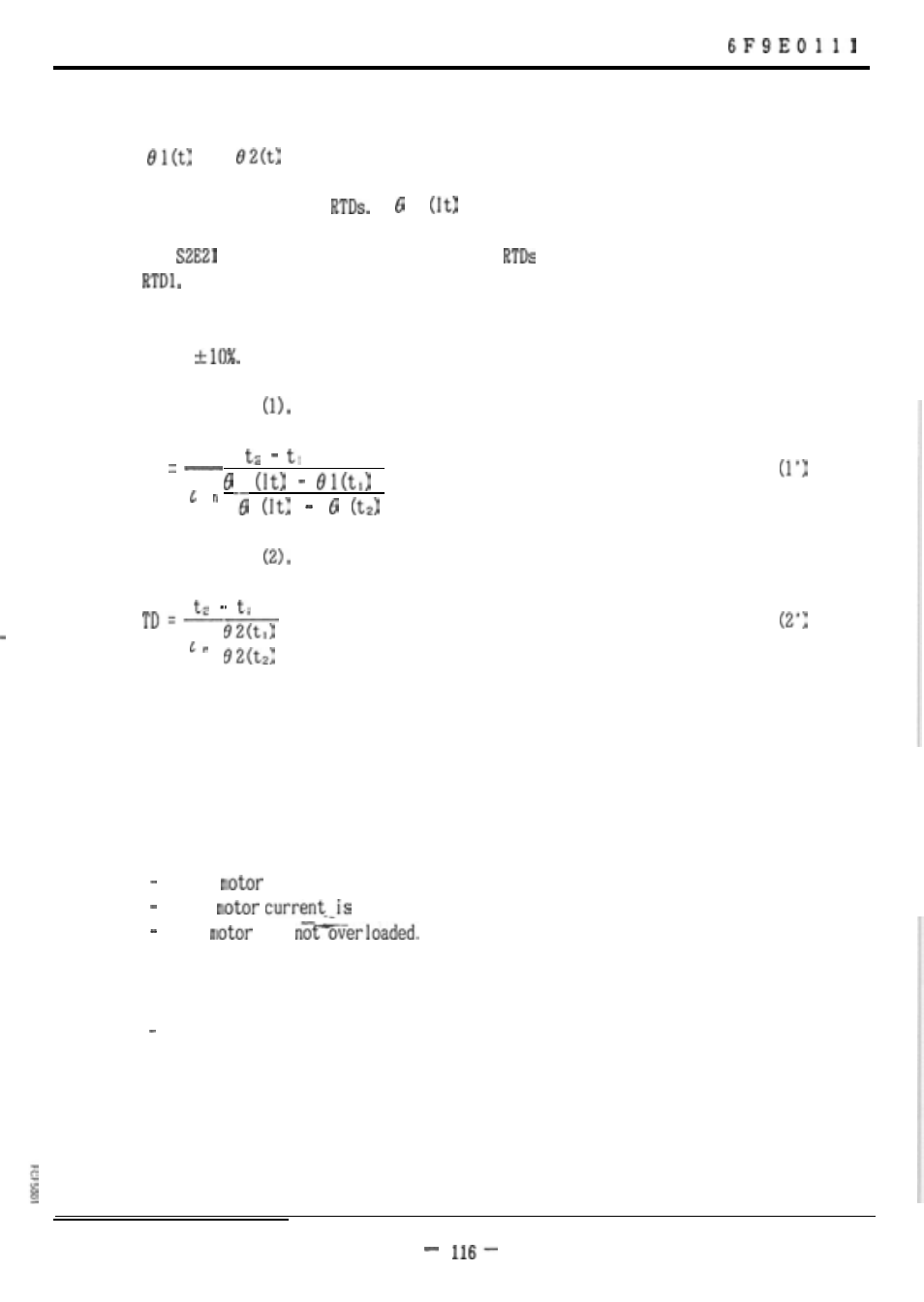
represent the motor temperature rises, which can be
determined by measuring the motor winding temperature and the ambient
temperature using the
is determined by the motor current.
The
receives signals from the three
in the winding at its inputs
RTD2, and RTD3 and also the ambient temperature at RTD8 to determine
the heating time constant and the cooling time constant from the motor
temperature rises. The accuracy of calculating these time constants is
about
From equation
the heating time constant is expressed as
TR
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
From equation
the cooling time constant is given by
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
-
-
At each start and stop of the motor, the heating time constant and the
cooling time constant are detected over a length of time equivalent to
these time constants.
Five measurements are taken and averaged to determine
the heating time constant and the cooling time constant.
[Requirements for detecting the heating time constant]
The
is sufficiently cool.
The
large enough (not too lightly loaded).
The
is
[Requirements for detecting the cooling time constant]
The motor is sufficiently heated.