Linak TECHLINE LA35 User Manual
Page 13
13
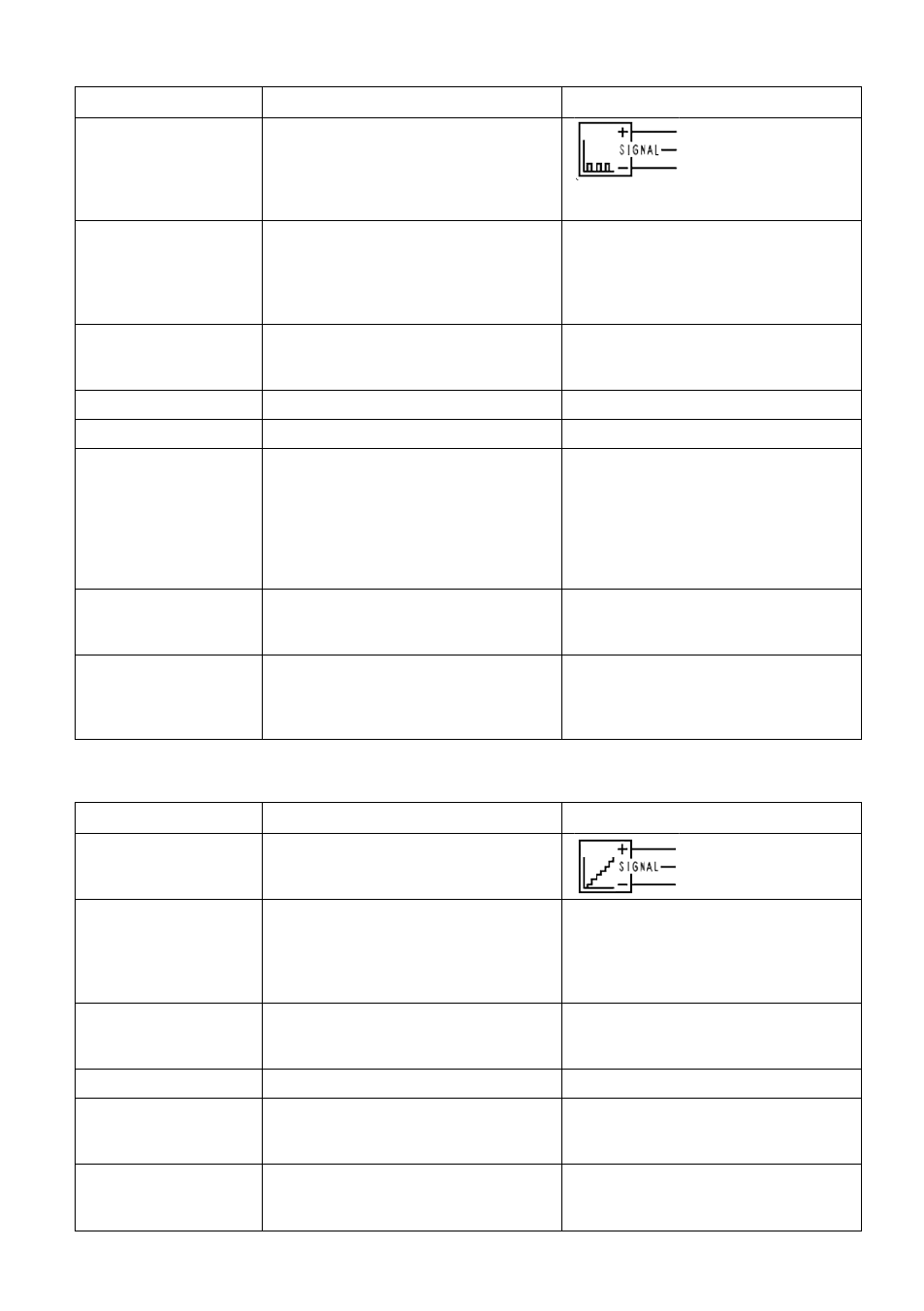
I/O Specifi cations: Relative positioning
I/O Specifi cations: Absolute positioning
Item
Specifi cation
Comment
Description
The actuator can be equipped with a hall
sensor and a spindle magnet. In this way
you can have pulses from the actuator
when it moves. The output signal is a PNP
signal.
Input Voltage
10-28 V DC
Feedback circuit to be powered 1second
before motor runs, and until 1 second
after the motor has stopped.
Cable dimension 6 x 0.5 mm
2
(6 x AWG20)
Output voltage
Same as input voltage
Typical Output voltage:
HIGH: Output = Input -1V (+/- 0.5V)
LOW: Output = 0-0.5V
Current consumption
Current consumption is max. 40 mA
Also when actuator is not running
Switching capacity
100 mA, max.
Resolution
The feedback system gives 8 pulses per
spindle turn:
3 mm pitch = 0.38 mm per pulse
5 mm pitch = 0.63 mm per pulse
9 mm pitch = 1.13 mm per pulse
12 mm pitch = 1.5 mm per pulse
Pulse/pause minimum 10 Milliseconds.
On 100 mm stroke you will have the fol-
lowing number of pulses:
3 mm pitch = 266 pulses
5 mm pitch = 160 pulses
9 mm pitch = 88 pulses
12 mm pitch = 66 pulses
Connection
Supply: White (Pin 3)
Ground: Black (Pin 1)
Signal: Violet (Pin 4)
See fi gure 3
Use cable 0367003-XXXX
Combinations
The Relative positioning can be combined
with potential free
Switches. But cannot be combined with
absolute positioning
35xxxxxxHxxxxx
Item
Specifi cation
Comment
Description
The actuator can be equipped with
electronic circuit that gives an analog
feedback signal when the actuator moves.
Input Voltage
11-28 V DC
Feedback circuit to be powered 1 second
before motor runs, and until 1 second
after the motor has stopped.
Cable dimension 6 x 0,5 mm
2
(6 x AWG20)
Output voltage
0 -10V
0V = Fully retracted
10V = Fully extended
+/- 0.5V
Current consumption
Current consumption is max. 40 mA
Also when actuator is not running
Connection
Supply: White (Pin 3)
Ground: Black (Pin 1)
Signal: Violet (Pin 4)
See fi gure 4
Use cable 0367003-XXXX
Combinations
The Absolute positioning can be combined
with potential free Switches. But cannot
be combined with relative positioning
35xxxxxxAxxxxx