Parameters – MITSUBISHI ELECTRIC Merservo MR-J2S- B User Manual
Page 97
5 - 8
5. PARAMETERS
Classifi-
cation
No. Symbol
Name and Function
Initial
Value
Unit
Setting
Range
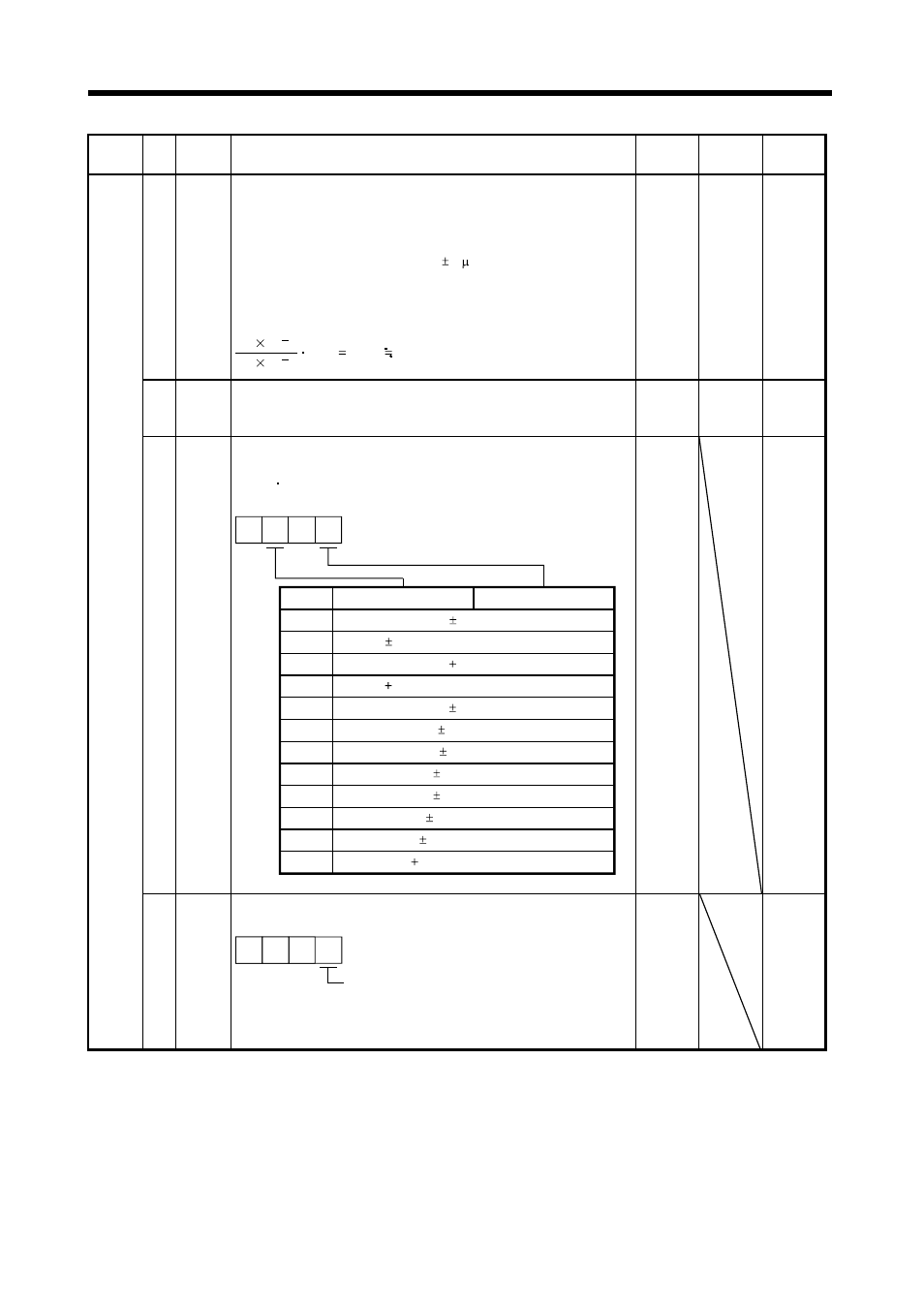
20
INP
In-position range
Used to set the droop pulse range in which the in-position (INP) will
be output to the controller. Make setting in the feedback pulse unit
(parameter No. 6).
For example, when you want to set 10 m in the conditions that the
ball screw is direct coupled, the lead is 10mm, and the feedback
pulses are 8192 pulses/rev (parameter No. 6 : 1), set "8" as indicated
by the following expression.
10 10
6
10 10
3
8192 8.192
8
100
pulse
0
to
50000
21
MBR
Electromagnetic brake sequence output
Used to set a time delay (Tb) from when the electromagnetic brake
interlock signal (MBR) turns off until the base circuit is shut off.
0
ms
0
to
1000
22
MOD
Analog monitor output
Used to select the signal provided to the analog monitor
(MO1) analog monitor (MO2).
(Refer to section 5.3.)
Analog monitor1 (MO1)
Setting
0
Servo motor speed ( 8V/max. speed)
1
Torque ( 8V/max. torque) (Note)
2
Servo motor speed ( 8V/max. speed)
3
Torque ( 8V/max. torque) (Note)
4
Current command ( 8V/max. current command)
5
Speed command ( 8/max. speed)
6
Droop pulses ( 10V/128 pulses)
7
Droop pulses ( 10V/2048 pulses)
8
Droop pulses ( 10V/8192 pulses)
9
Droop pulses ( 10V/32768 pulses)
A
Droop pulses ( 10V/131072 pulses)
0
0
B
Bus voltage ( 8V/400V)
Analog monitor2 (MO2)
Note. 8V is outputted at the maximum torque.
0001
Refer to
name
and
function
column.
Ad
ju
st
me
n
t p
ar
ame
te
rs
23
*OP1
Optional function 1
Used to make the servo forced stop function invalid.
Servo forced stop selection
0: Valid (Use the forced stop (EM1).)
1: Invalid (Do not use the forced stop (EM1).)
Automatically switched on internally
0
0 0
0000
Refer to
name
and
function
column.