3 configuration examples, 4 proprietary pdu format 2 messages – ifm electronic JN2301 User Manual
Page 9
UK
Inclination sensor JN
9
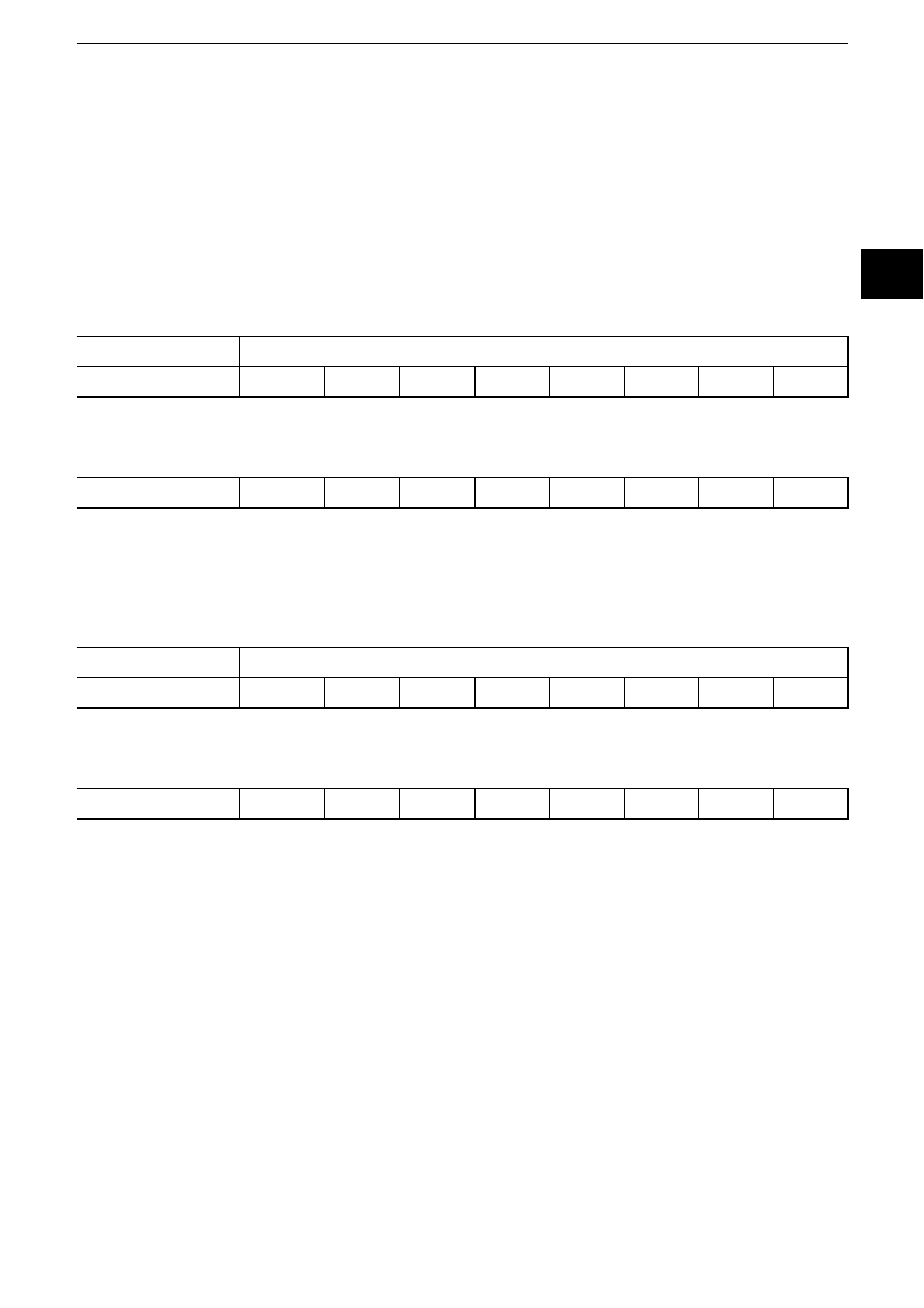
7.3 Configuration examples
Address target unit (ECU): 0x19
Address control unit / master: 0x14
Priority of the message: 3
Example: Set FIR filter for angle measurement to lowpass 5 Hz, index 0x2043/2
Master → ECU
CAN identifier
8-byte data frame
0xCEF1914
0x43
0x20
0x01
0x00
0x02
0x00
0x00
0x00
Response master ← ECU, status code: OK
0xCEF1419
0x43
0x20
0x01
0x00
0x02
0x00
0x00
0x00
Example: Read FIR filter for angle measurement, index 0x2043
Master → ECU
CAN identifier
8-byte data frame
0xCEF1914
0x43
0x20
0x00
0x00
0x00
0x00
0x00
0x00
Response master ← ECU, status code: OK
0xCEF1419
0x43
0x20
0x00
0x00
0x02
0x00
0x00
0x00
7.4 Proprietary PDU format 2 messages
The measured data of the JN2301 sensor is sent cyclically via proprietary PDU
format 2 messages� PDU format (PF) corresponds to the value 0xFF� In this case
the PDU-specific byte (PS) is the group extension (GE); it can be freely set by the
user in the range 0x00 – 0xFF�
In the following these parameter groups are called transmit PGNs (TxPGNs)�
JN2301 supports two TxPGNs:
TxPGN0
2-byte angle information longitudinal X, 2-byte angle information lateral Y
TxPGN1
4-byte angle information longitudinal X, 4-byte angle information lateral Y