E0: reset-lock enable (factory use only), E1a: servo and phase clock direction control, E1b: servo/phase clock source control – Delta Tau 4Ax-603625-xUxx User Manual
Page 15: E2: (reserved for future use), Jumper descriptions
UMAC-CPCI Turbo CPU Board Hardware Reference Manual
Jumper Descriptions
11
JUMPER DESCRIPTIONS
Note:
Pin 1 of an E-point is masked by an X and a bold square in white ink on the composite
side, and by a square solder pad on the solder side.
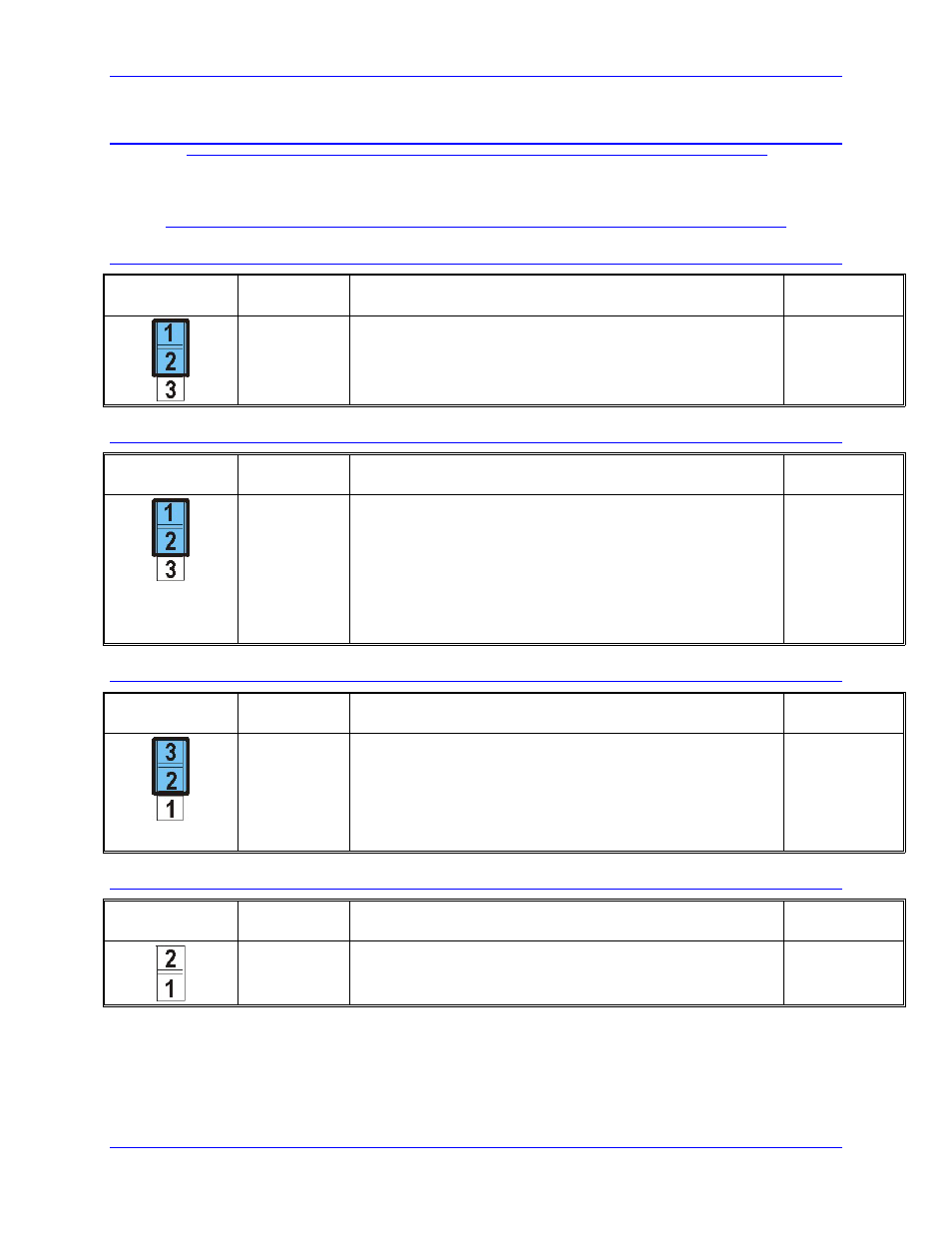
E0: Reset-Lock Enable (Factory Use Only)
E Point &
Physical Layout
Location Description Default
Jump pins 1 and 2 to lock the UMAC-CPCI Turbo CPU board in
the “reset” state to permit installation of on-board logic. This
setting for factory use only.
Remove jumper to permit normal operation of board.
No jumper
installed
E1A: Servo and Phase Clock Direction Control
E Point &
Physical Layout
Location Description Default
Jump pins 1 and 2 or remove jumper for the UMAC-CPCI system
to use its internally generated servo and phase clock signals and to
output these signals on the field wiring connector on the CPU
board. E1B should connect pins 2 and 3 or be removed.
Jump pins 2 and 3 for the UMAC-CPCI system to expect to
receive its servo and phase clock signals on J2 field-wiring
connector on the Turbo CPU board. E1B should also connect pins
1 and 2.
Pins 1-2
jumpered
E1B: Servo/Phase Clock Source Control
E Point &
Physical Layout
Location Description Default
Jump pin 1 to 2 to get phase and servo clocks from J7 RS422
connector (from an external source such as another UMAC).
Jump pin 2 to 3 to get phase and servo clocks from J1 backplane
connector (from an ACC-24C2x, or equivalent board).
Remove jumper to get phase and servo clocks from J2 Stack
connector (from an ACC-2E or equivalent board)
Pins 2 – 3
jumpered
E2: (Reserved for Future Use)
E Point &
Physical Layout
Location Description Default
No
jumper
installed