FeiYu Tech FY-91Q User Manual
Page 2
magnitude of leveling correction the flight controller will execute upon
pitching and rolling.
That is, these parameters control the degree (magnitude) of
recovery from when the airframe deviates
deviates
deviates
deviates
from
from
from
from
the
the
the
the
original
original
original
original
leveled
leveled
leveled
leveled
position
position
position
position
.
If the value is too small, this will result in a slow recovery process
and instability.
If the value is too large, the airframe will recover too quickly and
result in oscillation.
(2)
(2)
(2)
(2)
Stability
Stability
Stability
Stability
Continue
Continue
Continue
Continue
This parameter is set at zero (0), meaning adjustment of this
parameter is not allowed in this firmware.
(3)
(3)
(3)
(3)
Pitch
Pitch
Pitch
Pitch
Stability
Stability
Stability
Stability
Coefficient
Coefficient
Coefficient
Coefficient
and Roll
Roll
Roll
Roll
Stability
Stability
Stability
Stability
Coefficient
Coefficient
Coefficient
Coefficient
The two parameters, Pitch Stability Coefficient and Roll Stability
Coefficient, separately control the degree of angular stability rate
convergence in pitching and rolling movements.
It is the degree of control given by the controller which is used to
prevent movements at the aircraft pitch and roll axis.
If the parameter value is too small, the FC will control the
airframe pitching and rolling on its axis too slowly, resulting in poor
stability.
If the value is too high, axial oscillations will occur.
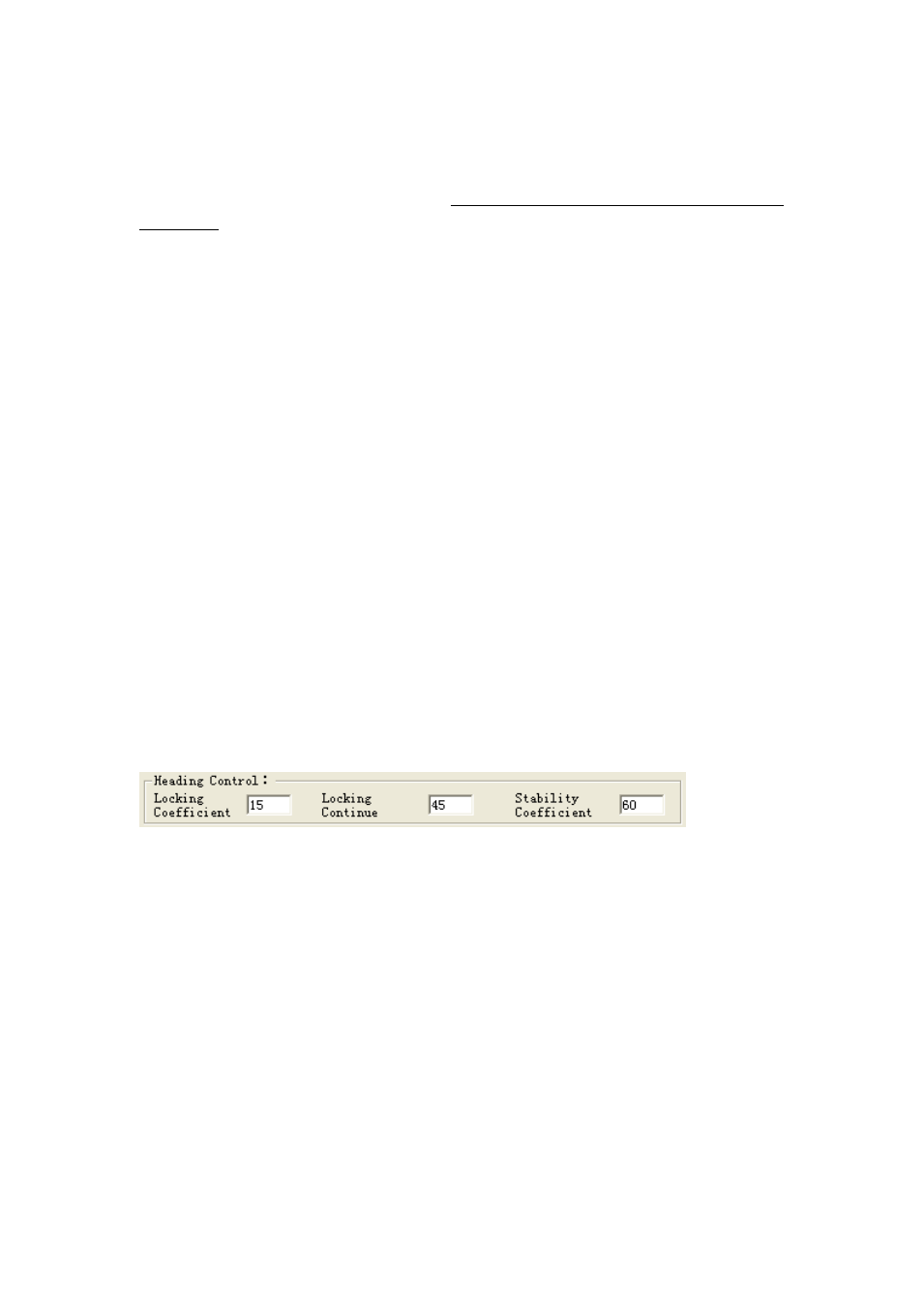
2.
2.
2.
2.
Heading
Heading
Heading
Heading
Locking
Locking
Locking
Locking
Control
Control
Control
Control
(1) Locking
Locking
Locking
Locking
Coefficient
Coefficient
Coefficient
Coefficient
Locking Coefficient refers to the corrective action taken by the FC
to maintain flight heading hold.
If the value is too small, the heading hold will be too slow
resulting in directional drifting.
If the value is too high, heading hold will be carried out too
quickly resulting in oscillations.
(2)
(2)
(2)
(2)
Locking
Locking
Locking
Locking
Continue
Continue
Continue
Continue
Locking Continue refers to the degree of heading recovery given by
the controller in unit time.
If the value is too small, there will be a constant deviation between
the actual heading angle and the objective heading angle. This results
in difficulty to reach the objective flight heading angle.