Variable steering concept, Active rear axle steering – Liebherr LTM 1090-4.1 User Manual
Page 7
LTM 1090-4
.1
7
Variable steering concept
Active rear axle steering
The rear axles are electro-hydraulically actively steered depending on the speed
and the steering angle of the front axles. 5 steering programmes (P) are prese-
lectable by push button.
• Distinct reduction of the tyre wear
• Improvement of the manoeuvrability
• Stable driving performance also at high speeds
• All 4 axles steerable
High safety standards –
complete know-how from Liebherr
• Centring cylinders for automatic straightening of the rear axles in case
of failure
• Two independent hydraulic circuits with wheel driven and motor driven
hydraulic pumps
• Two independent steering computers
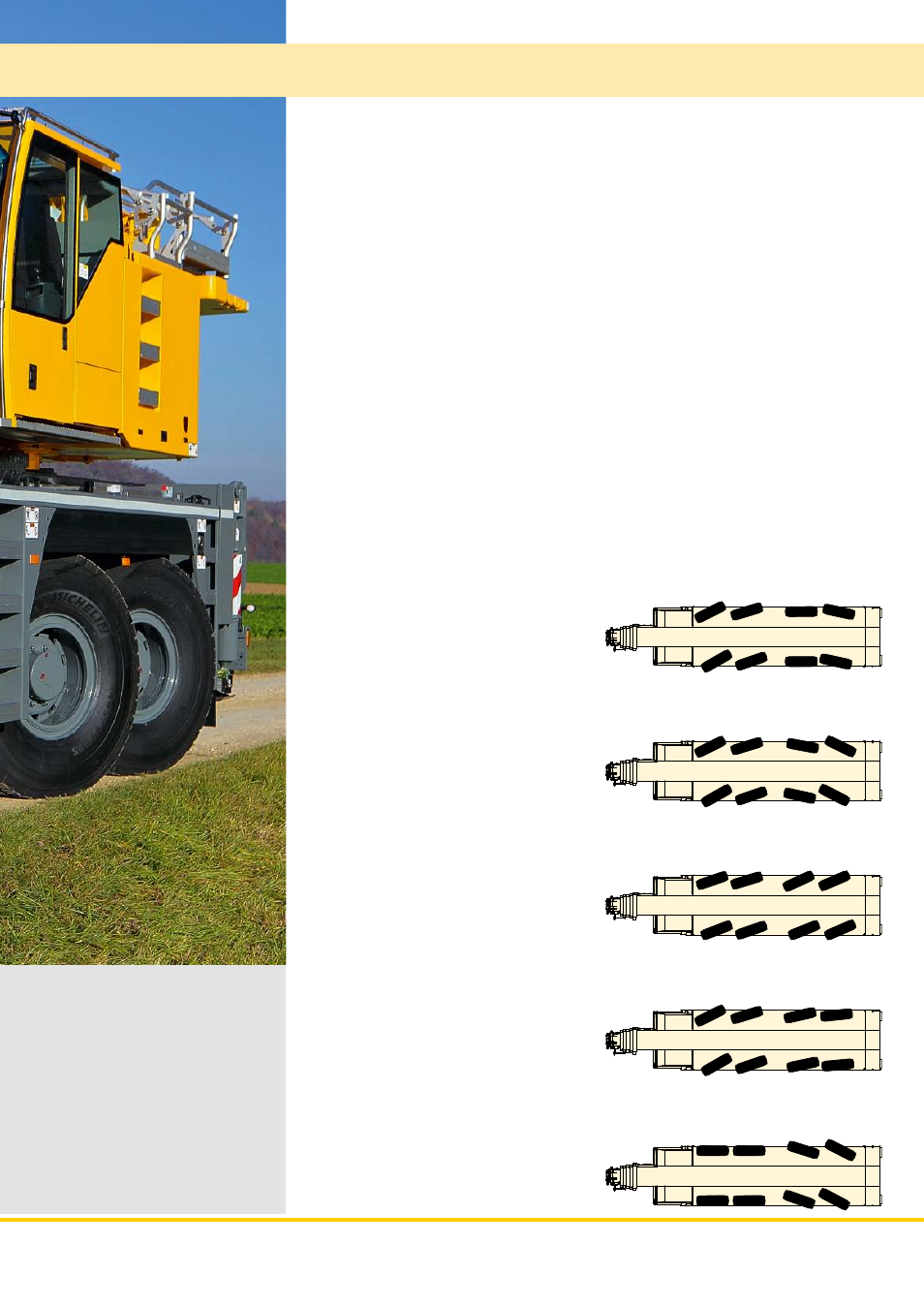
P1 Road steering
The axles 1 and 2 are mechanically
steered by the steering wheel. The axle
4 is actively steered depending on the
speed and on the steering angle of the
front axle. From 30 km/h it will be ad-
justed to straight driving and fixed. Axle 3
is none steered for road driving.
P2 All-wheel steering
The axles 3 and 4 are turned by the
steering wheel depending on the steering
angle of the front axle to provide for the
smallest turning radius.
P3 Crab steering
The axles 3 and 4 are turned by the steer-
ing wheel to the same direction as the
steering position of axle 1 and 2.
P4 Reduced swing out
The axles 3 and 4 are turned depending
on the wheel turn of the front axles to
minimize the back swing of the rear of the
chassis.
P5 Independent rear axle steering
The axles 1 and 2 are steered by the
steering wheel, the axles 3 and 4 are
steered by push buttons independently
from the steering angle of the axles 1
and 2
Centring cylinder at the rear axles
• Automatic straight positioning of
the rear axles in case of failure