2 disable watchdog mode, 3 silent mode, Disable watchdog mode 2.3.4.3. silent mode – Bosch TTCAN User Manual
Page 12
User’s Manual
BOSCH
- 12/77 -
Revision 1.6
TTCAN
11.11.02
manual_about.fm
LBack
Loop Back Mode
one
Loop Back Mode is enabled.
zero
Loop Back Mode is disabled.
Silent
Silent Mode
one
The module is in Silent Mode
zero
Normal operation.
NoRAM
No Message RAM Mode
one
IF1 Registers used as Tx Buffer, IF2 Registers used as Rx Buffer.
zero
No Message RAM Mode disabled, normal Message RAM usage.
WdOff
Disable Watchdog
one
The Watchdog disabled.
zero
The Watchdog is enabled, after Initialization has finished (Init = 0).
Write access to the Test Register is enabled by setting bit Test in the CAN Control Register.
The different test functions may be combined, but Tx1-0
≠
“00” disturbs message transfer.
2.3.4.2 Disable Watchdog Mode
The TT Application Watchdog (see chapter 3.5.6) can be disabled by programming the Test
Register bit WdOff to
one and the Application_Watchdog_Limit AppWdL to 0x00. When bit
Test in the CAN Control Register is reset, WdOff is also reset if the TTCAN is in time triggered
operating mode; if the TTCAN is in event driven CAN mode, WdOff is remains set and the TT
Application Watchdog remains disabled (emulating the C_CAN function).
The TT Application Watchdog should not be disabled in a TTCAN application program.
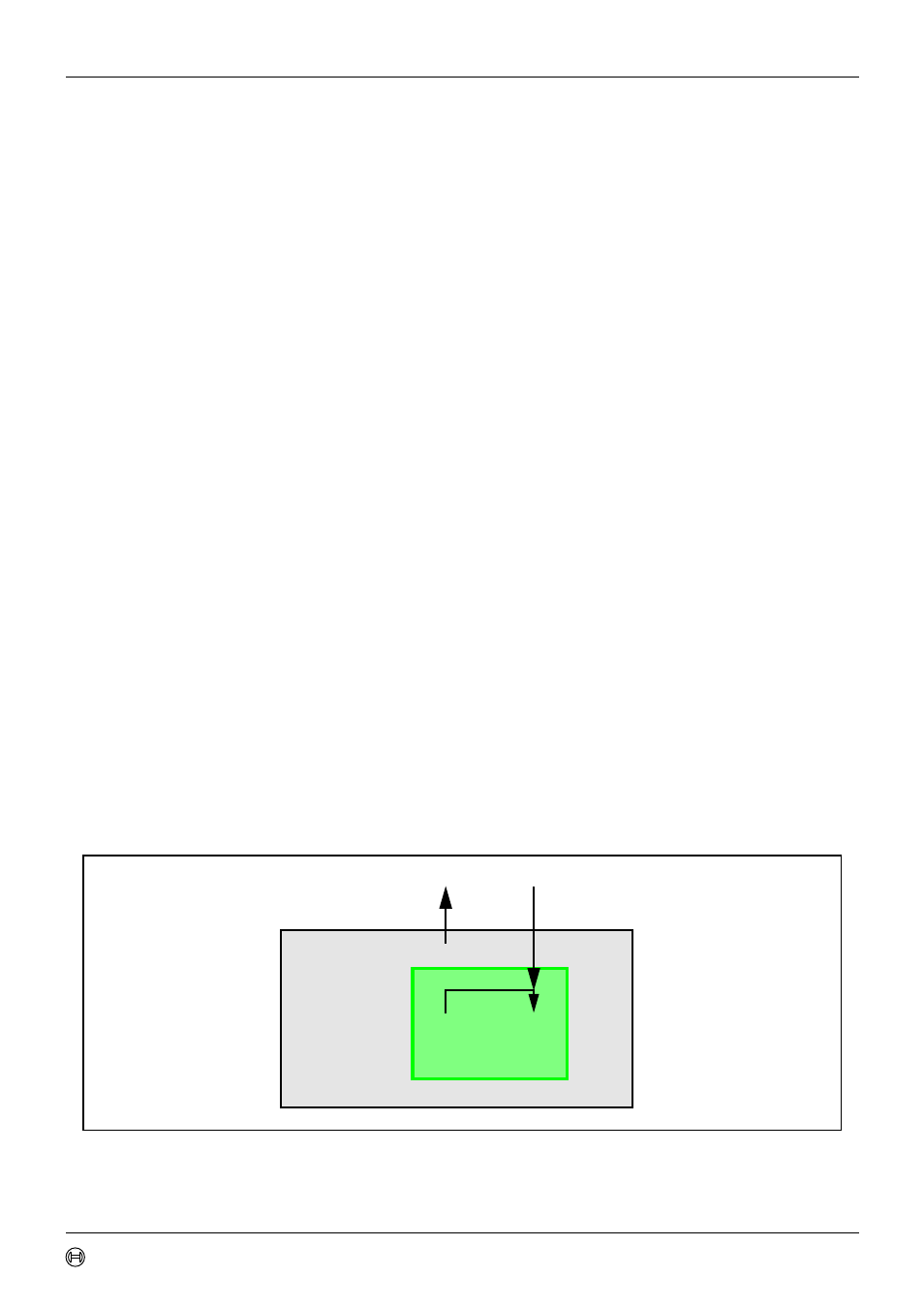
2.3.4.3 Silent Mode
The CAN_Core can be set in Silent Mode by programming the Test Register bit Silent to
one.
In Silent Mode, the TTCAN is able to receive valid data frames and valid remote frames, but it
sends only
recessive bits on the CAN bus and it cannot start a transmission. If the CAN_Core
is required to send a
dominant bit (ACK bit, overload flag, active error flag), the bit is rerouted
internally so that the CAN_Core monitors this
dominant bit, although the CAN bus may remain
in
recessive state. The Silent Mode can be used to analyse the traffic on a CAN bus without
affecting it by the transmission of
dominant bits (Acknowledge Bits, Error Frames). Figure 2
shows the connection of signals CAN_TX and CAN_RX to the CAN_Core in Silent Mode.
Figure 2: CAN_Core in Silent Mode
In ISO 11898-1, the Silent Mode is called the Bus Monitoring Mode.
CAN_TX CAN_RX
Tx
Rx
CAN_Core
•
•
=1
TTCAN