2 with standalone boards – Atmel ATAVRAUTOEK1 User Manual
Page 4
ATAVRAUTOEK1 Getting Started
ATAVRAUTOEK1 User Guide
1-4
7700A–AUTO–06/07
1.3.2
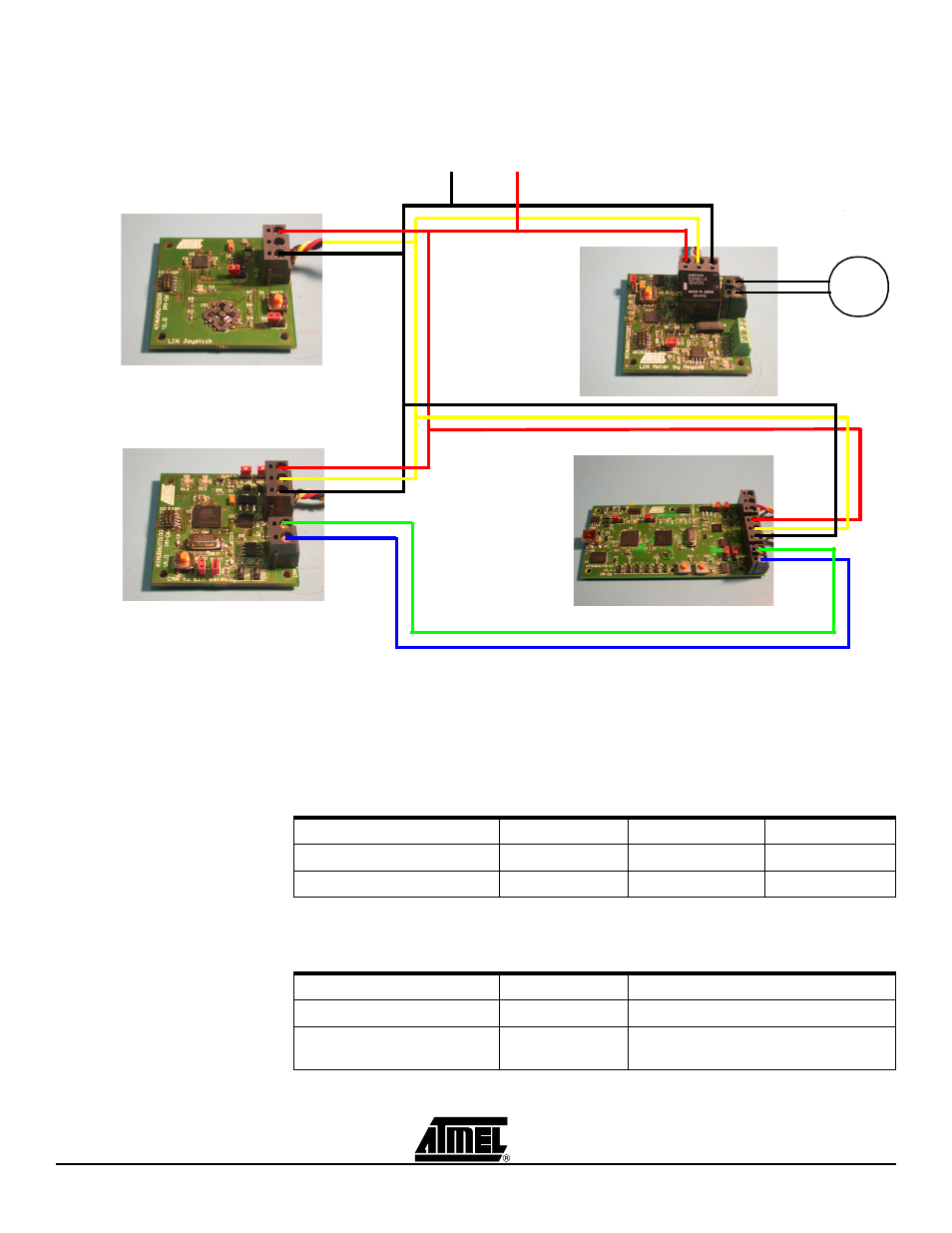
With standalone
boards
Connect your board as indicated below using the cables included in the kit and connect
a DC voltage source (8 to 18V) to VBat.
Figure 1-3. ATAVRAUTOx Boards connection
You are now ready to run the demo:
Press the left or right button of the joystick to operate the DC Motor forward or
backward.
Use X-Analyser with the ATAVRAUTO102 to send CAN frame to gateway board to get
the motor current and the motor power supply values.
Use X-Analyser with the ATAVRAUTO102 to analyse the LIN bus.
VBAT
LIN
GND
CANH
CANL
M
ATAVRAUTO200
ATAVRAUTO102
ATAVRAUTO100
ATAVRAUTO300
GND
+8V to +18V
Table 1-1. Standard CAN frames to send to the gateway
Name
Type
Identificateur
Length
Get_Current
Remote
0x05
0
Get_Power_Supply
Remote
0x06
0
Table 1-2. LIN frames available on the LIN network
Name
Identifier
Function
NET_CTRL
0x01
Get motor information from the joystick
DC_INFO
0x22
Return DC motor power supply value
and current value to the gateway