Dynamixel ax-12 – Axis Communications Dynamixel AX-12 User Manual
Page 8
DYNAMIXEL
AX-12
bioloid
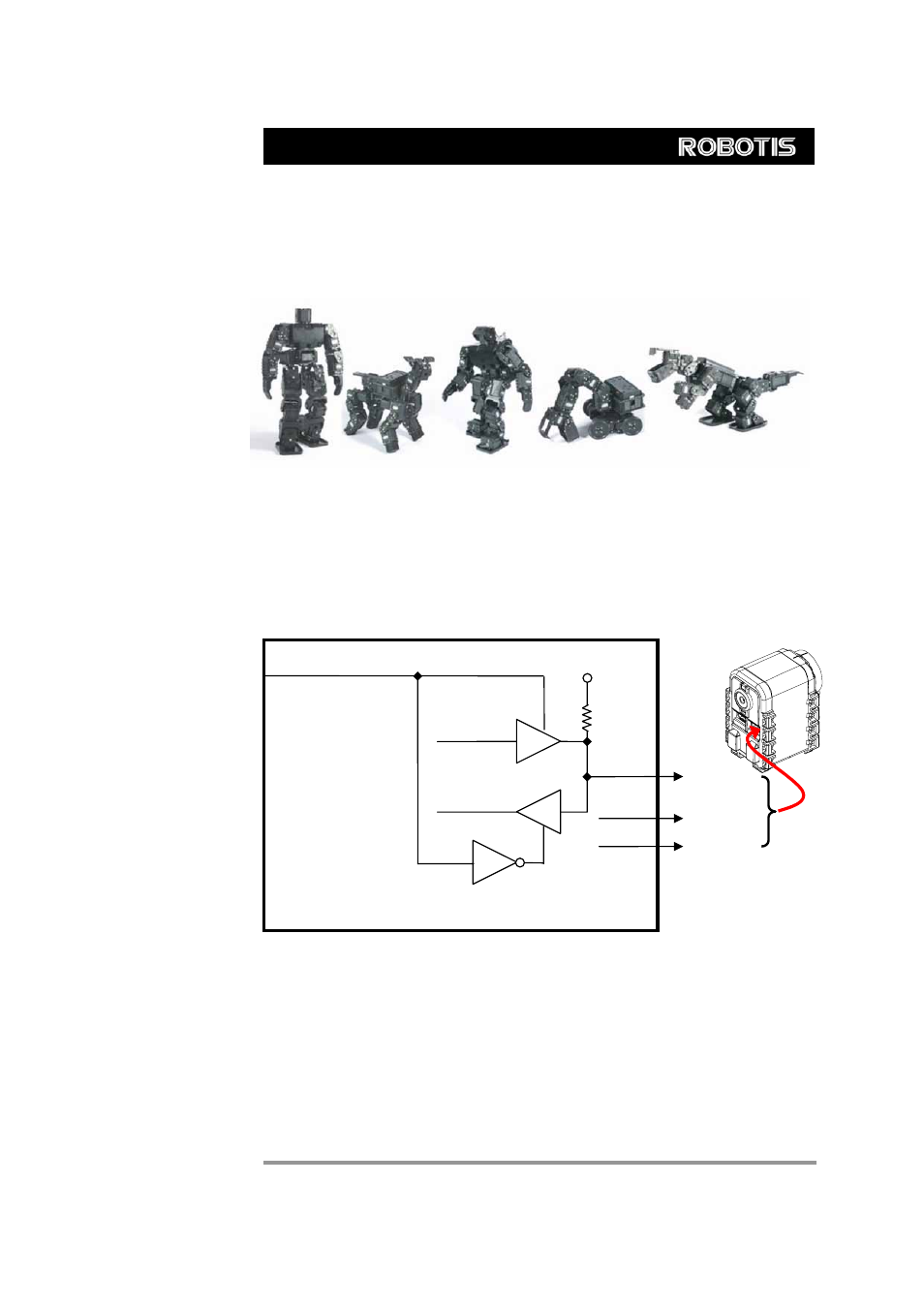
A robot can be built using only the CM-5 controller and a number of AX-12 actuators. An
edutainment robotic kit named “Bioloid” is available which is based on the CM-5
controller and the AX-12 actuators.
An example of a robot built with Bioloid
For details, please refer to the Bioloid manual.
Connection to UART To control the Dynamixel actuators, the main controller needs to convert its UART
signals to the half duplex type. The recommended circuit diagram for this is shown
below.
The power is supplied to the Dynamixel actuator from the main controller through Pin 1
and Pin 2 of the Molex3P connector. (The circuit shown above is presented only to
explain the use of half duplex UART. The CM-5 controller already has the above
circuitry built in, thus the Dynamixel actuators can be directly connected to it)
The direction of data signals on the TTL level TxD and RxD depends on the
DIRECTION_PORT level as the following.
DATA
TXD
RXD
74HC04
74HC126
DIRECTION_PORT
CM-5 internal circuit (HALF DUPLEX UART)
10K
5V
DATA(PIN3)
9.6V
VDD(PIN2)
GND
GND(PIN1)
74HC126
7