Led status symbols, Continued), Symbol description – Rapid-Air SMART MINI-SERVO FEED: SMS2, SMS4, SMS8 User Manual
Page 14
led statUs symbols
(ContinUed)
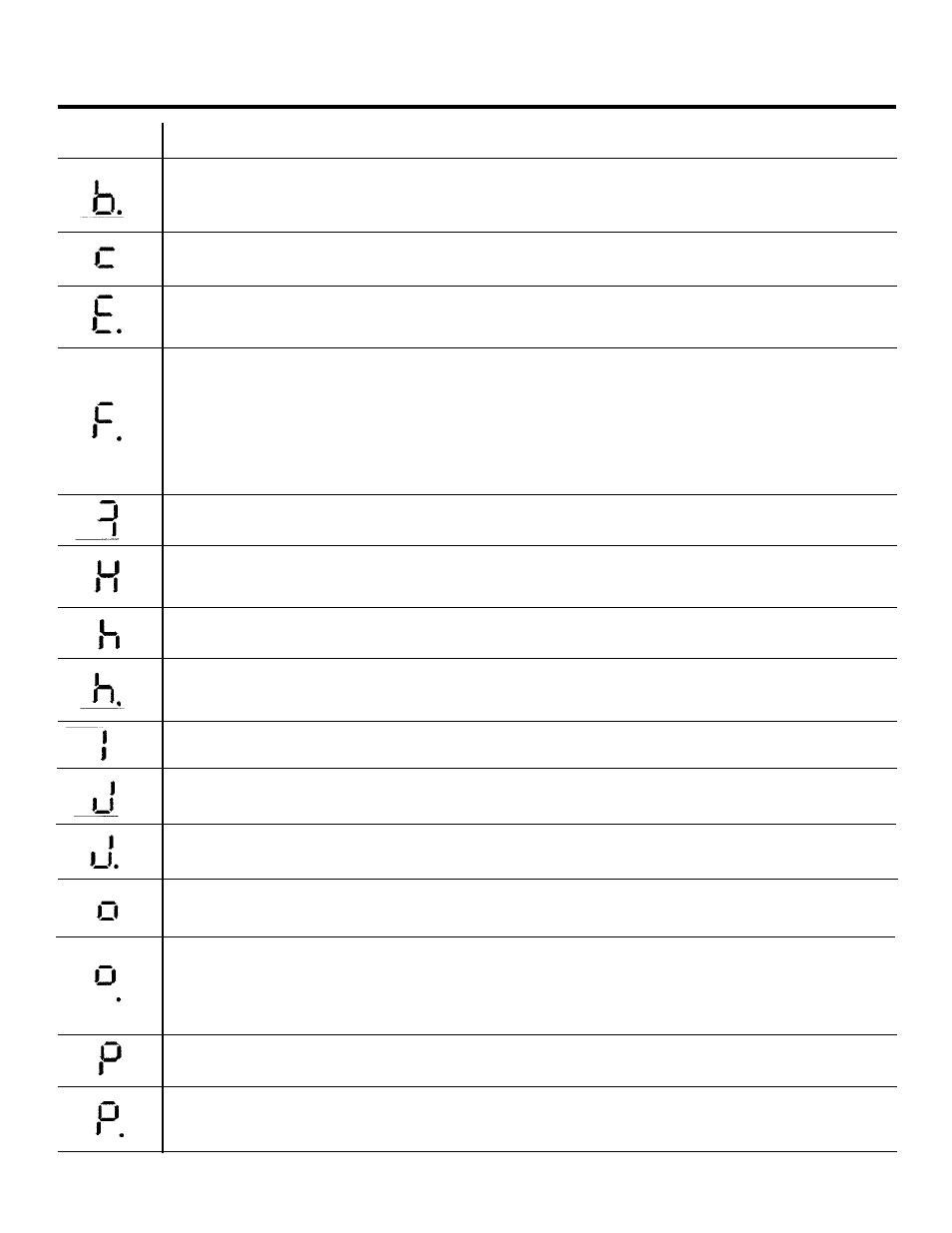
Symbol
Description
Power base not ready. This error condition applies only to 3-phase models. These drives have a pre-charge
circuit which must activate after power-up before the drive can be enabled. If the drive is enabled before
this then the error occurs. The error could also indicate the loss of one or more of the input phases.
Cam. A cam profile is in progress.
General error. The motion toolbar displays the status of AXISERROR, which is a bit pattern of all
latched errors.
Position or velocity following error. A following error has occurred. Following errors could be caused by a
badly tuned drive/motor, especially at high acceleration and deceleration rates where the following error
will typically be greater. The following error limit can be adjusted to suit your application. Following error
could also be the caused by encoder/resolver loss. Confirm that the motor is not overloaded
or stalling. Check the tuning of the drive using the WorkBench v5 Fine-tuning tool. The KVELFF parameter
can be used to reduce following errors during moves.
Follow mode. The drive is in pulse follower or electronic gearing modes.
Hold. The Hold DIP switch is active or the PLC Task has requested a Hold state. Motion will be ramped to
zero demand and will then hold on position while the switch is active.
Homing. The drive is currently homing.
Preset homing active. The drive is currently homing. This motion has been triggered from a Preset move
table.
Incremental move. An incremental move is in progress.
Jog. The drive is Jogging.
Preset jog move active. The drive is Jogging. The Jog was triggered from a Preset jog table.
Offset move. The drive is performing an offset move.
Overspeed. The measured speed of the motor has exceeded the trip level defined by DRIVESPEEDFATAL.
When accelerating to a demand speed close to the trip level, there will typically be a certain amount of
overshoot. Using the Fine-tuning tool, check the amount of overshoot you get with the acceleration and
demand speeds being used in your application.
Positional Move. A point-to-point move is in progress.
(Decimal point flashing)
Preset moves are active, but currently idle (no motion)