Table 4. command-byte bit assignments, Command byte functions, Configuration byte functions – Rainbow Electronics MAX1617A User Manual
Page 12: Status byte functions
The Alert Response can activate several different slave
devices simultaneously, similar to the I
2
C™ General
Call. If more than one slave attempts to respond, bus
arbitration rules apply, and the device with the lower
address code wins. The losing device does not gener-
ate an acknowledge and continues to hold the ALERT
line low until serviced (implies that the host interrupt
input is level-sensitive). Successful reading of the alert
response address clears the interrupt latch.
Command Byte Functions
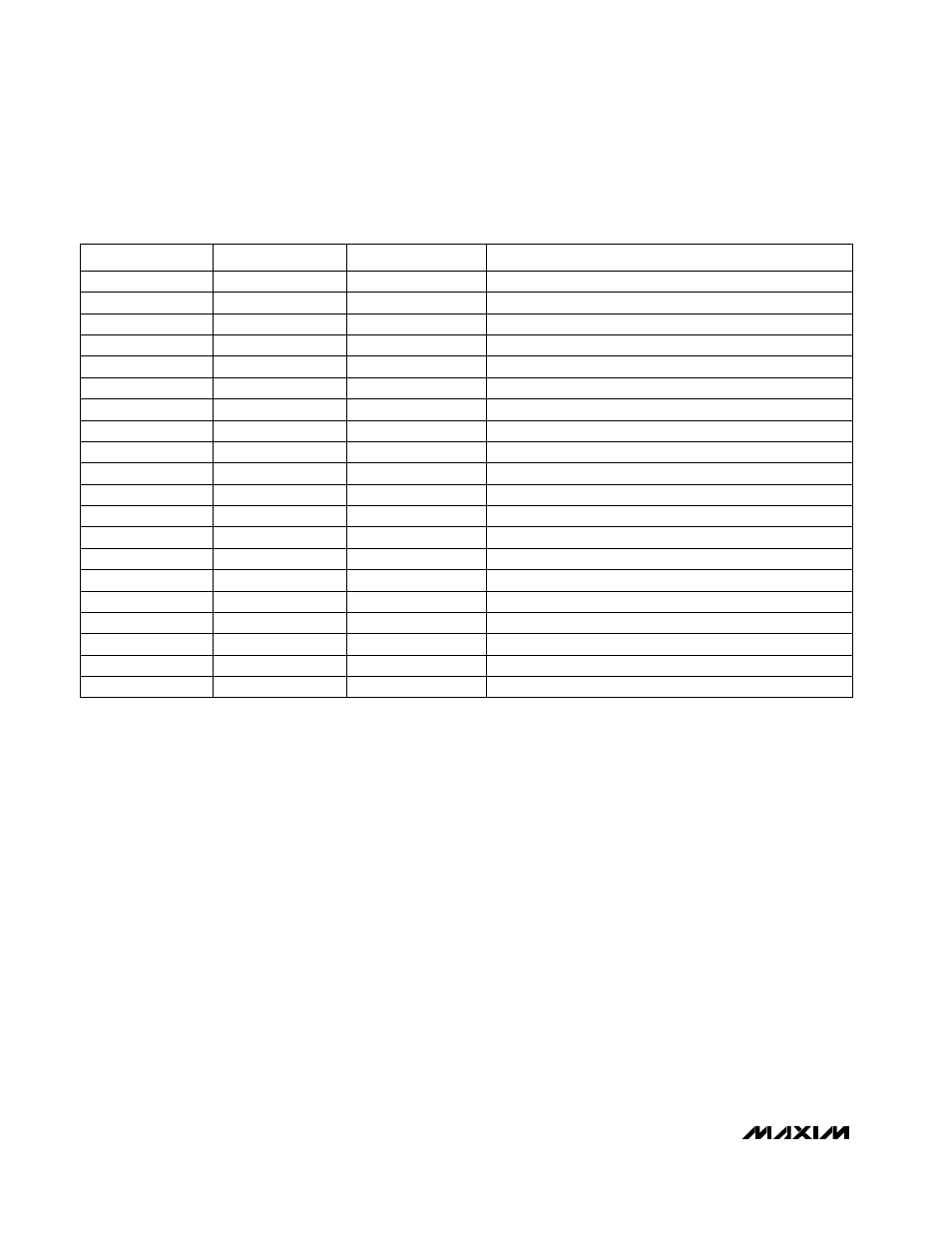
The 8-bit command byte register (Table 4) is the master
index that points to the various other registers within the
MAX1617A. The register’s POR state is 0000 0000, so
that a Receive Byte transmission (a protocol that lacks
the command byte) that occurs immediately after POR
returns the current local temperature data.
The one-shot command immediately forces a new conver-
sion cycle to begin. In software standby mode
(RUN/STOP bit = high), a new conversion is begun, after
which the device returns to standby mode. If a conversion
is in progress when a one-shot command is received, the
command is ignored. If a one-shot command is received
in auto-convert mode (RUN/STOP bit = low) between con-
versions, a new conversion begins, the conversion rate
timer is reset, and the next automatic conversion takes
place after a full delay elapses.
Configuration Byte Functions
The configuration byte register (Table 5) is used to
mask (disable) interrupts and to put the device in soft-
ware standby mode. The lower six bits are internally set
to (XX1111), making them “don’t care” bits. Write zeros
to these bits. This register’s contents can be read back
over the serial interface.
Status Byte Functions
The status byte register (Table 6) indicates which (if
any) temperature thresholds have been exceeded. This
byte also indicates whether or not the ADC is convert-
ing and whether there is an open circuit in the remote
diode DXP–DXN path. After POR, the normal state of all
the flag bits is zero, assuming none of the alarm condi-
tions are present. The status byte is cleared by any
MAX1617A
Remote/Local Temperature Sensor
with SMBus Serial Interface
12
______________________________________________________________________________________
Table 4. Command-Byte Bit Assignments
*
If the device is in hardware standby mode at POR, both temperature registers read 0°C.
Read remote temperature: returns latest temperature
RRTE
01h
00h
COMMAND
0000 0000*
0000 0000*
POR STATE
Read configuration byte
RCL
03h
02h
0000 0000
N/A
Read status byte (flags, busy signal)
RSL
Read local T
HIGH
limit
RLHN
05h
Read local temperature: returns latest temperature
RLTS
04h
0111 1111
0000 0010
Read remote T
HIGH
limit
RRHI
07h
06h
0111 1111
1100 1001
Read local T
LOW
limit
RLLI
Read conversion rate byte
REGISTER
RCRA
Write configuration byte
WCA
09h
08h
N/A
1100 1001
FUNCTION
Write local T
HIGH
limit
WLHO
0Bh
0Ah
N/A
N/A
Write conversion rate byte
WCRW
Write remote T
HIGH
limit
WRHA
0Dh
Read remote T
LOW
limit
RRLS
0Ch
N/A
N/A
One-shot command (use send-byte format)
OSHT
0Fh
0Eh
N/A
N/A
Write remote T
LOW
limit
WRLN
Write local T
LOW
limit
WLLM
Write software POR
SPOR
FCh
N/A
Read device ID code
DEVID
FFh
FEh
00000001
0100 1101
Read manufacturer ID code
MFGID
I
2
C is a trademark of Phillips Corp.