FeiYu Tech FY-AP117 User Manual
Ap 117 osd operation manual
Guilin Feiyu Electronic Technology Co, Ltd.
http://www.feiyudz.cn Email: [email protected]
Guilin Feiyu Electronic Technology Co, Ltd.
http://www.feiyudz.cn Email: [email protected] 1
AP 117 OSD operation manual
Dear customers:
Hello! Thank you for purchasing the AP117 OSD of Guilin Feiyu Electronic Technology Co, Ltd. In
order to achieve full potential and safe operation of this product, please carefully read this manual prior to
installation.
Preface
The AP117 OSD overlays flight telemetry information onto your video image. The telemetry
information displayed includes altitude, flight speed, flight direction, and home direction. The AP117 can
be connected to the FY-21AP and FY-3ZT systems to display autopilot telemetric data, or to a GPS
receiver to display positioning data.
AP117 automatically adapts to either PAL or NTSC video input. The adaptive processes within
about 2S.
Working status explanation:
After connecting the power supply, the indicator LED light will be activated. The AP117 will
automatically detect the incoming video (NTSC or PAL).
The "NTSC" or "PAL" will overlaid on the
screen when the video signal is formatted. If receive signal from FY-21AP FY-3ZT or the GPS module,
the working indicator of AP117 OSD will begin to flash.
Once the input video is detected even if there is interruption to the video signal, the telemetry data of
the AP117 will continue to be transmitted via the video stream.
GND
Audio IN
VCC
Video IN
①
GND
Audio Out
VCC
Video Out
①
GND PWM
VCC
GND
①
GND +3.3V Data TX Data RX
END VCC ENG GND CUR AD
+5V
① 1. DANGER: The three “VCC” ports (positive) for Video In, Video Out and Power In are all
inter-connected. Therefore you are allowed to connect ONE input voltage only. DO NOT input
more than one power supply or damage to the OSD will occur.
2. It is recommended to power the OSD independently to ensure a clean video display.
3. Note that power to the OSD is not supplied by the FY-21AP module.
List of Interfaces
PORT
Connection Description
Video in
Camera or video input port
Video out
OSD Overlaid video output, connect to video transmitter or video screen
SW
RC receiver switch input to control OSD display
Power
OSD video overlay board and camera and video transmitter power supply.
Data in
FY-21AP/FY3ZT/GPS data interface
Current Sensor
Current sensor input for measuring the battery voltage and current.
Detailed description of the “Video in” port
GND
Connect to the camera GND
Audio IN
Audio input (Connect to the audio output of the camera).
VCC
Connect to camera’s power supply “VCC”.
(Note: Power is supplied from the OSD to the Camera. Do not input any other
power supply through this port or damage will occur).
Video IN
Video input (Connect to the camera video signal output).
Detailed description of the “Video out” port
GND
Connect to video transmitter GND
Audio Out
Audio output (Connect to audio input of the video transmitter).
VCC
Connect to video transmitter power supply input “VCC”.
(Note: Power is supplied from the OSD to the video transmitter. Do not input
any other power supply through this port or damage will occur).
Video Out
Video output (connect to video transmitter video input ).
Detailed description of the “SW” port
GND
Connect to the power “GND” port of the RC receiver.
PWM
Connect to the signal port of your RC receiver (you need to designate to a free
channel).
Detailed description of the “Power” port
GND
Connected to the power “GND” that supply to the OSD control board.
VCC
Connect to the power “VCC” that supply to the OSD control board
(Safe input
range: DC6V to 16V)
Note: this power supply is sent directly to your Video Camera and Video
Transmitter. E.g. if you are using a 12 volt Video Camera and Transmitter, the
input voltage should also be 12 volt.
Detailed description of the “FY-21AP/GPS(Data in)” port
GND
FY-21AP GND ,or the GND of the GPS
+3.3V
Use only to supply power to the FY-GPS module .
(
DO NOT
connect this port to the FY-21AP or the FY-3ZT ).
Data TX
Connect to the “RX1” data output port of the FY-21AP/FY-3ZT,or the “RX”
port of the GPS module.
Data RX
Connect to the “TX1” data output port of the FY-21AP/FY-3ZT,or the “TX”
port of the GPS module.
Detailed description of the Current Sensor port
Name
Introduction
+5V
+5V power supplied to the current sensor from OSD (Yellow)
CUR AD
Connect to the current sensor output signal (White)
ENG GND Connect to battery negative (Black)
ENG VCC
Connect to battery positive (Red)
Current sensor:
Application diagram
A P117 OSD can directly connect to the data output port of FY-21AP or FY-3ZT , or separately connect
to the output port of GPS module, and then overlay the flight data information to the video signal.
Note:in the Figure4 the modules in the imaginary line frame means that you can choose any one of these
modules to connect .
PWM
Video&OSD
Power
Current
Sensor
Motor
power
Video
Transmitter
Camera
Motor
GPS
E SC
Figure4.
Connection Schematic Diagramme
FY-3ZT
FY-21AP
Interface introduction
The telemetry data is as bellowing:
1
Attitude measurement error coefficient
(refer to the prompt)
11
The quantity of satellite used for
positioning
2
GPS speed (Unit: km/h)
12
Power battery current (Unit:A)
3
The pitch angle of the plane (Unit deg)
13
Relative altitude (Unit : m)
4
The roll angle of the plane (Unit deg)
14
Horizon position display
5
Current latitude and longitude of the
plane (Format: “dddmm.mmm” )
15
The angle of turning to the return point
(Unit: deg)
6
Total flight time (Format: “mm: ss”)
16
Course angle of flight (Unit:deg)
7
Flight mode
17
Operating temperature(Unit: ℃)
8
Distance to take-off Point (Unit : m)
18
The battery voltage of the video
transmitter (Unit:V)
9
Power battery voltage (Unit:V)
19
The battery power consumed
(Unit: mA / h)
10
Climb rate (Unit:m/s)
Error Coefficient Assessment(Attitude measurement error coefficient assessment)
1.
Attitude measurement error coefficient is an assessment (ECA) of the aircraft attitude as measured
by FY-21AP or FY-3ZT.
2.
“0” value is normal, maximum value is “1000”.
3.
The higher the ECA the more error in autopilot attitude control.
4.
If this coefficient continues to increase to 1,000 in the flight, this indicates the FY-21AP or FY-3ZT
do not meet the requirements of automated flight, so flight control will be transferred back to you
(manual flight or RC mode).
5.
This is usually caused by installations that result in high vibrations or shock to the FY21AP or
FY3ZT. You will need to check or adjust the autopilot installation to reduce vibration.
Introduction for the flight State of FY-21AP or FY-3ZT
Name
Introduction
RC
Manual Flight. Autopilot deactivated.
ABM
Auto balance mode
FAF
For FY-21AP:Fixed Altitude flying mode; for FY-3ZT:Air route fly mode
RTL
Auto Return Mode
ACM
Auto Circle Mode
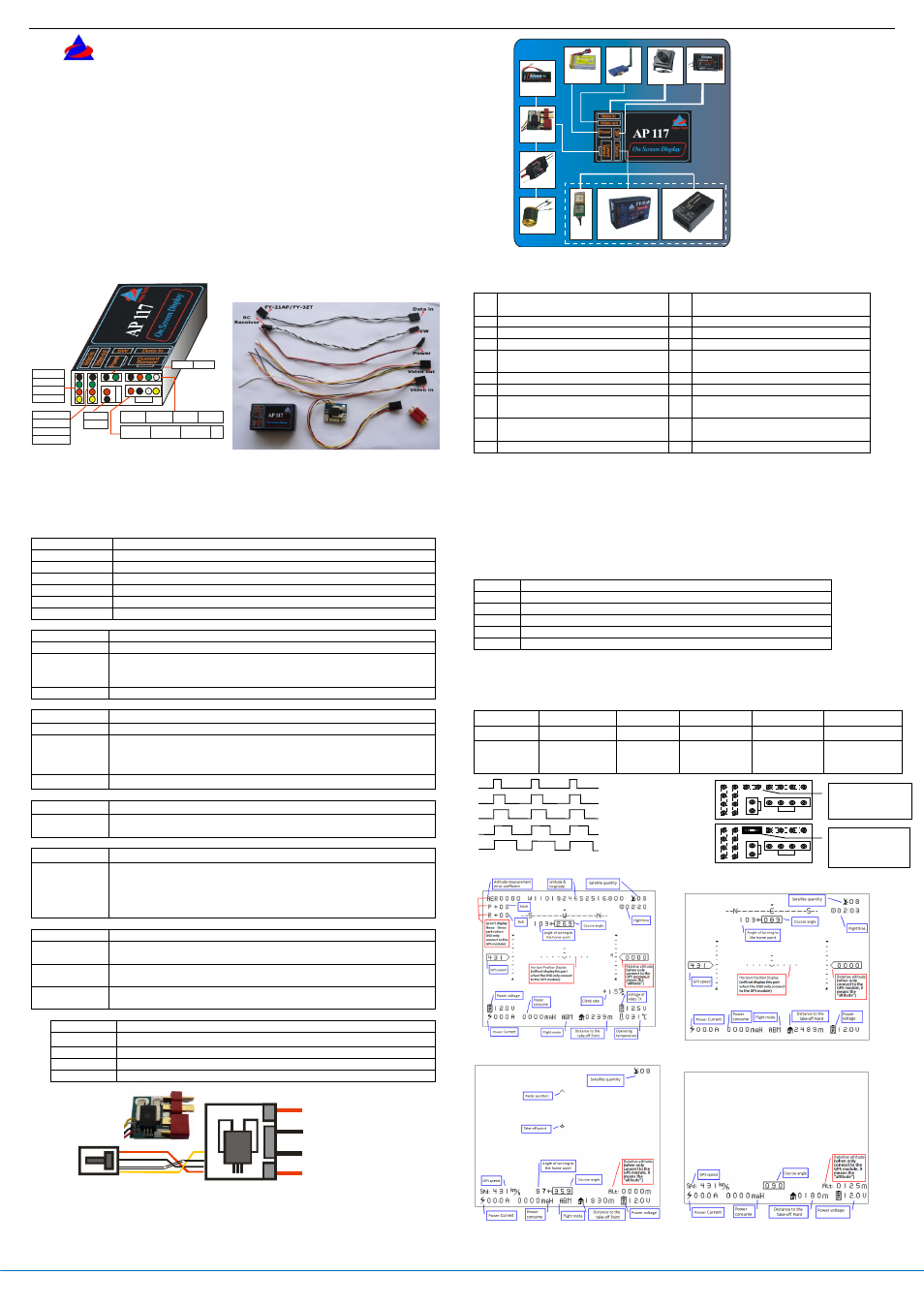
Display Modes
The OSD can be controlled to show different desiplay imformations via one spare channel of your
radio Rx. There are 5 optional desplay modes controlled by the different PWM signals.
You can use
default mode if you do not want to change the display modes.Mode B is default when the SW
connector left unconnected.Mode C is default when a jumper is used in the SW connector.
PWM Signal
900-1140μs
1140-1380μs
1380-1620μs
1620-1860μs
1860-2100μs
display mode
Mode E
Mode D
Mode C
Mode B
Mode A
Items
No informations
displayed
Brief Mode
Default Mode
with radar
function
Default Mode
With artificial
horizon
All informations
displayed
The modes shown as below:
A. All informations displayed
B. Default Mode With artificial horizon
C. Default Mode with radar function
D. Brief Mode
Note: We reserve the right to change this manual at any time! And the newest edition will be shown on
our website www.feiyudz.cn.
Figure2.Parts list
Figure1.Connection Interface
900-1140μs Mode E
1140-1380μs Mode D
1380-1620μs Mode C
1620-1860μs Mode B
1860-2100μs Mode A
FeiyuTech
Yellow
White
Black
Red
Battery positive input
Battery negative input
Output negative to ESC
Output positive to ESC
Mode-B is default
when SW left
unconnected.
Mode-C is default
when using a
jumper.
Figure4.Connection Schematic Diagram