Pioneer 2 User Manual
Page 48
Updating and Reconfiguring P2OS
42
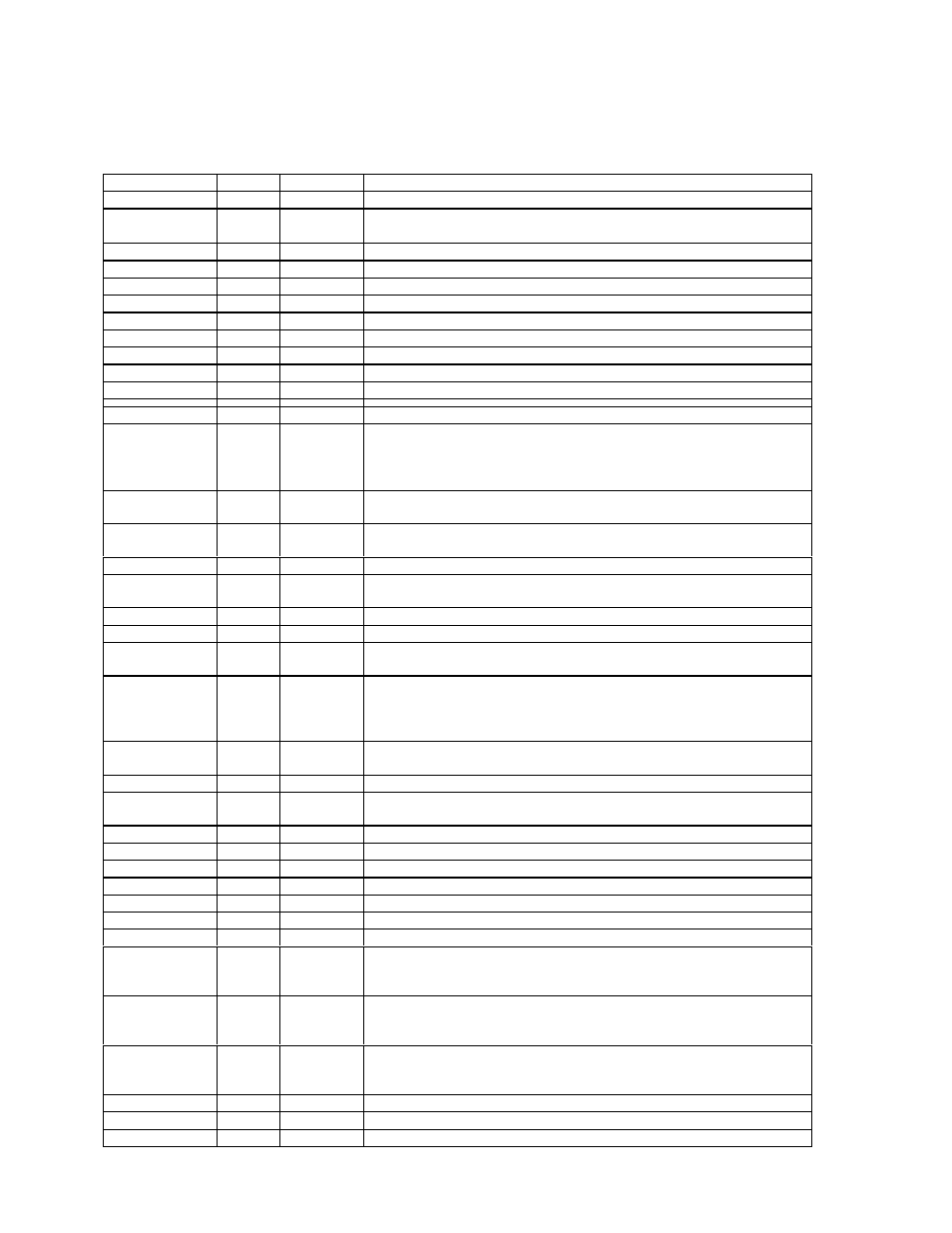
Table 7-2. Pioneer 2 DX configuration parameters
(P2OS 1.9)
KEYWORD
Type
Default
Description
CONSTANTS
Cannot be changed using p2oscf
Type
string
Pioneer
String identifies the robot as a Pioneer type and is included in the SYNC2
connection return packet along with Subtype and Name.
Subtype
string
P2DX
Identifies the Pioneer model; P2AT or P2CE for other models.
Serial
string
factory set
Serial number for the Pioneer 2.
FourMotors
byte
0
Is '1' for the four-motor Pioneer 2-AT
RotVelTop
integer
360
Maximum allowable rotational velocity in degrees per second
TransVelTop
integer
2200
Maximum allowable speed in millimeters per second
RotAccTop
integer
600
Maximum allowable rotational (de)acceleration in degrees per second
TransAccTop
integer
4000
Maximum allowable translational (de)acceleration; millimeters per second
PwmMax
integer
500
Maximum motor pulse period (500=fully on).
Compass
Integer
0
Compass type: 0=none; 1=V2XG; 2=TCM2
VARIABLES
Parameters that you may change with p2oscf
Name
string
not_set
Unique name you may give your Pioneer 2. Besides its ownership value, this
parameter gets passed to a connecting client as the first argument in the
SYNC2
packet, therefore useful for differentiating among multiple Pioneers.
Maximum of 20 characters; no intervening spaces.
SInfoCycle
byte
0
Server information packet communication cycle time: 0=classic 100
milliseconds, as for PSOS; 1=new 50ms cycle time
HostBaud
byte
0
Baud rate for host (client) serial port connection. 0=9600, 1=19200,
2=38400 bps.
AuxBaud
byte
2
Baud rate for second (AUX) serial port; values as for HostBaud
HasGripper
integer
0
'1' if P2 Gripper installed into User I./O; ‘2’ if installed in General I/O;
otherwise 0
FrontSonar
integer
1
'1' if front sonar array installed; otherwise 0
RearSonar
byte
0
'1' if rear sonar array installed; otherwise 0
LowBattery
integer
110
In 1/10 volts; microcontroller alarm activated when battery charge falls
below this value.
RevCount
integer
20000
The number of encoder ticks for a 360 degree revolution of the robot. Reset
this parameter to a number that best reflects the characteristics of your robot
in a particular environment. See revcountcal utility.
WatchDog
integer
2000
Milliseconds time before robot automatically stops if it has not received a
command from a client. Restarts on restoration of connection with client.
P2Mpacs
byte
0
'1' enables new, extended P2OS server information packet.
StallVal
integer
200
Maximum PWM before stall; either or both motors. If > PwmMax, never
stalls.
StallCount
integer
100
Milliseconds after a stall for recovery. Motors not engaged during this time.
CompX
integer
0
Compass calibration X-offset (See compasscal utility)
CompY
integer
0
Compass calibration Y-offset (See compasscal utility)
RotVelMax
integer
200
Maximum velocity for completion of a Colbert or similar rotation.
TransVelMax
integer
300
Maximum velocity for completion of a Colbert or similar translation.
RotAcc
integer
50
Rotational acceleration in degrees per second
RotDecel
integer
50
Rotational deceleration in degrees per second
RotKp
integer
30
Proportional PID parameter for responsiveness of the drive system. Lower
values make a slower, less-responsive system; higher values make the robot
"zippier", but can lead to overshoot and oscillation.
RotKv
integer
60
Differential PID dampens oscillation and overshoot. Increasing values gives
better control oscillation and overshoot, but they also make the robot’s
movements more sluggish.
RotKi
integer
0
Integral PID adjusts residual error in turning and velocity. Higher values
make the robot correct increasingly smaller errors between its desired and
actual angular position and speed.
TransAcc
integer
300
Translational acceleration in degrees per second
TransDecel
integer
300
Translational deceleration in degrees per second
TransKp
integer
30
see RotKp